A-15
Appendices
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
A-2 Connecting the G5-series Servo Drive
A
A-2-2 Servo Drive Settings
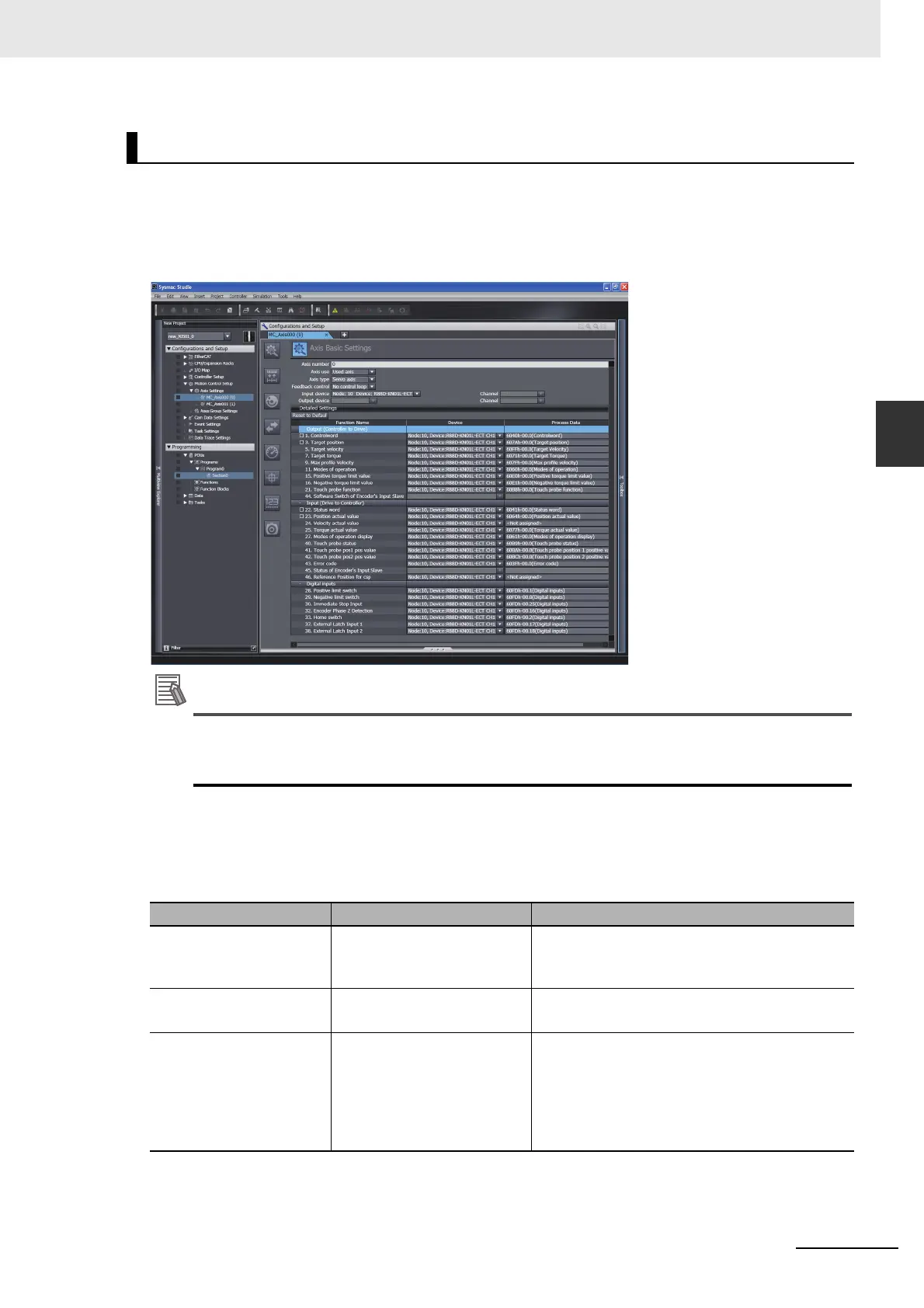
The functions of the MC Function Module are related to the information in the process data objects.
Depending on the EtherCAT slave configuration and functions that are used by the MC Function Mod-
ule, you sometimes must change the relationships between the MC Function Module and the PDOs.
To access the settings, click the Detailed Settings Button on the Axis Basic Settings Display in the
Sysmac Studio.
If you use the recommended OMRON Servo Drives (R88D-KN-ECT, version 2.1 or later,
or R88D-KN-ECT-L, unit version 1.1 or later), then it is not necessary to change the default
relationships between MC Function Module functions and the PDOs on the Sysmac Studio.
Output Settings (Controller to Servo Drive)
The input settings apply to the command data that is sent from the MC Function Module to the Servo
Drive. The default settings in the Sysmac Studio are listed in the following table. (Required objects
are marked with a star.)
Relationships between MC Function Module and Process Data
Function name Process data Description
Control word 6040 hex-00.0 (Controlword) This data is used to control the status of the Servo
Drive.
Set 6040 hex: Controlword.
Target position 607A hex-00.0 (Target posi-
tion)
The target position for position control.
Set 607A hex: Target position.
Target velocity 60FF hex-00.0 (Target veloc-
ity)
The target velocity for velocity control.
This object is necessary to output to the Servo
Drive in Cyclic Synchronous Velocity Control
Mode by the MC_SyncMoveVelocity (Cyclic Syn-
chronous Velocity Control) and other instructions.
Normally set 60FF hex: Target velocity.

 Loading...
Loading...







