2 Motion Control Configuration and Principles
2-4
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
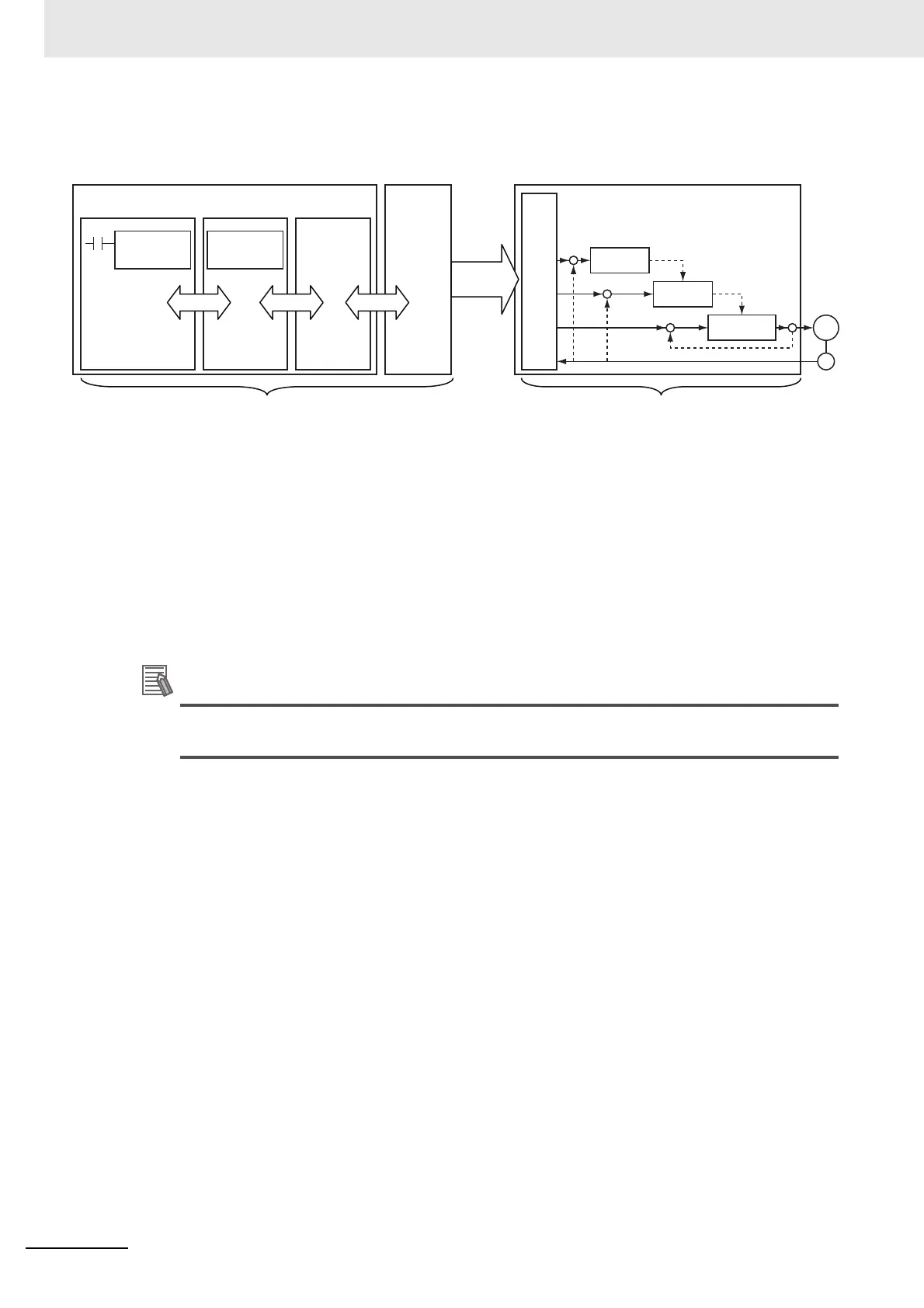
Configuration on CPU Unit
• When motion control instructions are executed in the user program, the MC Function Module inter-
prets the resulting commands.
• The MC Function Module then performs motion control processing at a fixed period based on the
results of the command interpretation. It generates command values to send to the Position Interface
Unit (Pulse Output Unit). The following command values are generated: target position and target
velocity.
• Generated command values are output to the Servo Drive as pulse trains.
• The Servo Drive performs position loop control and velocity loop control based on the command val-
ues which are output as pulse trains.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information on
the configuration to use the NX-series Position Interface Units.
M
E
NX102 CPU Unit or NX1P2 CPU Unit
Motion
control
instructions
User
program
MC Function
Module
Command
interpretation
Data processing
NX bus function
module
Servo Drive
Pulse trains
Position
control
Velocity
control
Torque
control
A feedback system is configured.A feedback system is not configured.
Position Interface
Unit

 Loading...
Loading...







