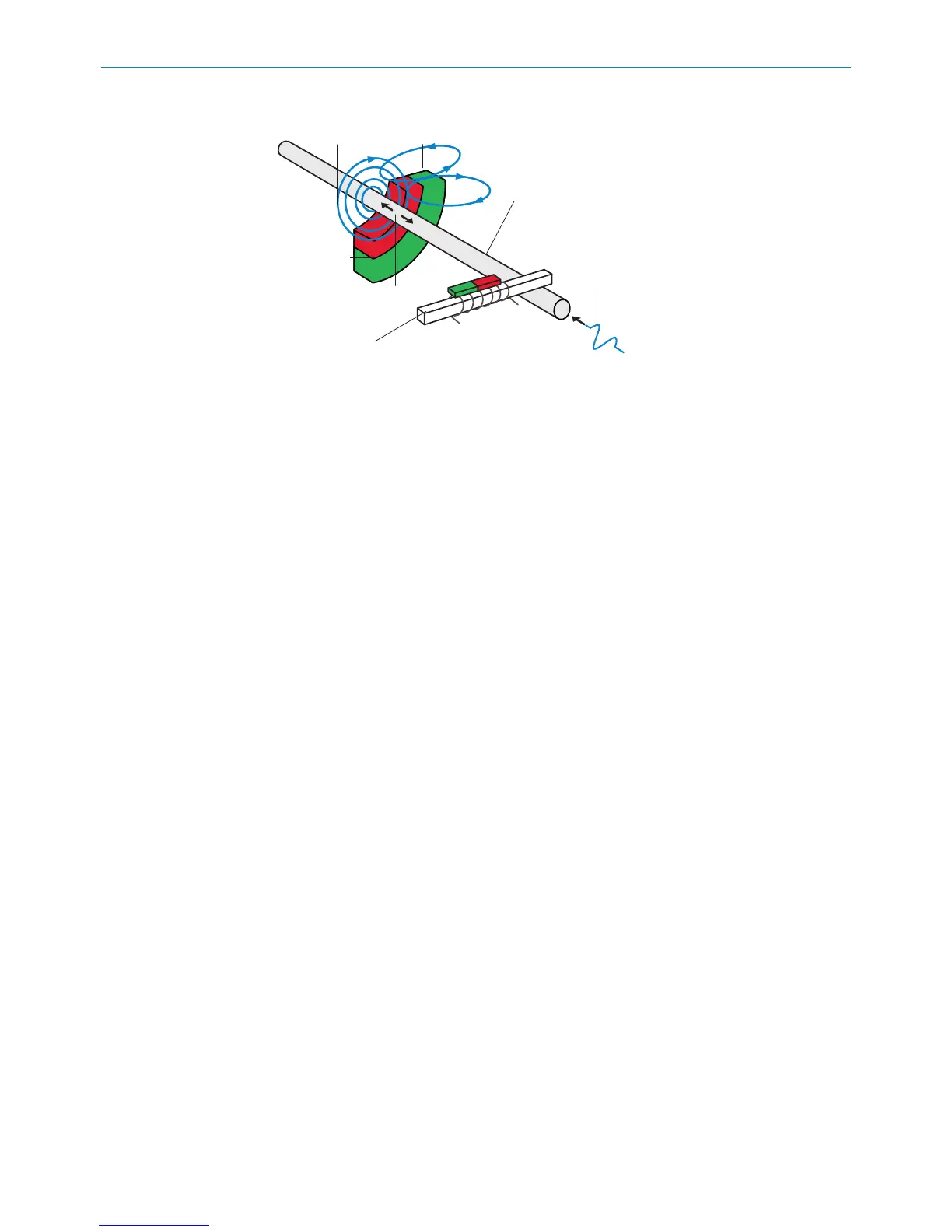
Figure 2: Schematic of the magnetostrictive measurement principle
1
Magnet field of the current pulse
2
Magnet field of the position magnet
3
Magnetostrictive sensor component
4
Current pulse
5
Sound wave converter
6
Structure-borne sound wave
7
Position magnet
The device operates on the magnetostrictive measurement principle that records the
actual path of a position magnet:
The radial magnet field (1) generated by the current pulse (4) interacts with the magnet
field (2) of the position magnet (7).
As a result of the interaction of the two magnet fields, a wave (ultrasonic) (6) is pro‐
duced in the magnetostrictive device component (3). This travels to the converter (5),
and the electronics produce an electrical output signal.
The time interval between the current pulse and the detection of the structure-borne
sound wave is measured, thereby enabling the precise position of the magnet – which
changes as the cylinder moves – to be determined. As this measurement principle does
not require a reference point, no recalibration is necessary for this type of device.
The device is also maintenance-free as a result of the non-contact measurement.
PRODUCT DESCRIPTION
3
8022793/ZXZ4/2018-07-24 | SICK O P E R A T I N G I N S T R U C T I O N S | MAX
11
Subject to change without notice