•
Initialization: The device performs a hardware initialization and loads the most
recently saved standard configuration.
•
Pre-operational: The device can be configured via the CAN bus.
•
Operational: The device sends its measurement data via the CAN bus.
•
Stopped: The device stops transmitting data and waits for further commands.
SAE J1939
SAE J1939 is a multi-master protocol developed especially for applications in the
mobile field, i.e. for commercial and conveyor vehicles, as well as for construction, agri‐
cultural and forestry machines. An SAE J1939 network consists of various ECUs (Elec‐
tronic Control Units). An ECU can address messages to multiple CAs (Controller Applica‐
tions). After commissioning, the bus subscribers are automatically assigned addresses.
The CAN bus subscribers are now fully operable.
6.8 Communication objects
6.8.1 CANopen
When the device is in operational mode, the evaluation electronics integrated into the
device convert the measurement data into CAN messages, and transmit these mes‐
sages on the CAN bus. Where they can be received and processed by the controller. The
CAN bus uses the following communication objects for data transmission:
•
SDO (Service Data Object):
SDOs are used to set or query parameters relating to the encoder configuration.
These are accessed from the internal object directory of the device. To process
SDOs, the device must be in either the pre-operational or operational mode.
•
PDO (Process Data Object):
PDOs transmit process data, such as position and speed, to the controller. PDOs
are only generated in operational mode.
•
NMT (Network Management):
NMTs control the status of the network and individual components. They can also
be used for monitoring purposes using the following objects:
°
SYNC object:
The SYNC object synchronizes the bus communication, i.e. synchronous PDOs
are sent to the controller after a SYNC object is received.
°
Emergency object:
The emergency object sends error messages. As they generally have a higher
priority than PDOs, these emergency objects will be transmitted first.
°
Nodeguard object:
The CANopen linear encoder uses the node guarding protocol to perform the
error control services of the CANopen network.
The bus master uses a remote frame to send a nodeguard message to the
CANopen slave, and in response the slave reports its current NMT status
using a standard nodeguard message. The nodeguard frame format, and the
NMT state value definitions are shown in the following tables. The nodeguard
protocol is activated as default.
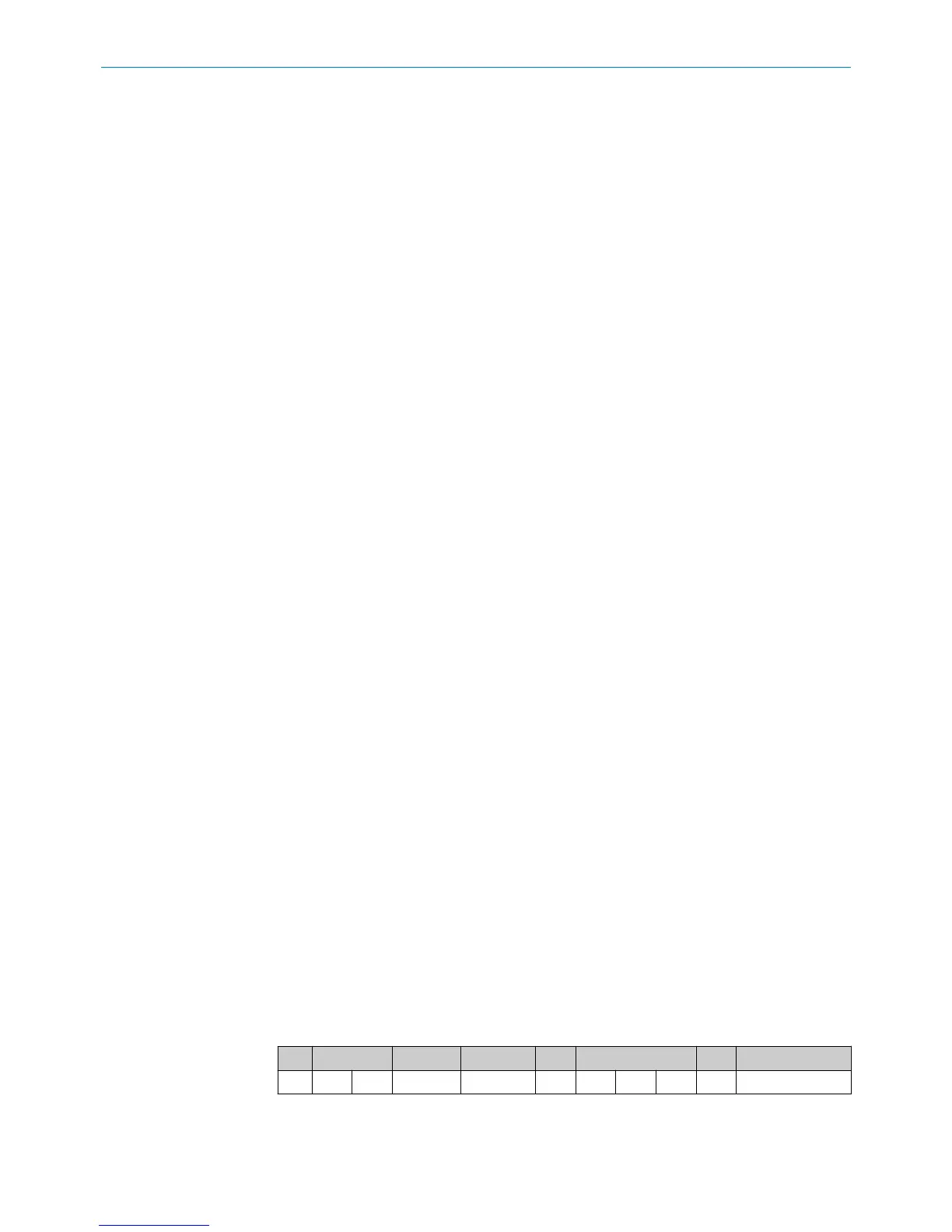
According to the CANopen protocol, each message has the following structure:
Table 17: Message in CANopen
SOF Arbitration Control Data Field CRC ACK EOF Interframe Space
1 11 1 6 0..8 bytes 15 1 1 1 7 ≥ 3
6 COMMISSIONING
30
O P E R A T I N G I N S T R U C T I O N S | MAX 8022793/ZXZ4/2018-07-24 | SICK
Subject to change without notice