These operating parameters are stored in the object directory of the device, which pro‐
vides the means for implementing the internal characteristics and functions of the
device, as well as external communication. For this purpose, the object directory is
divided into two parts: a Communication Profile, and a Device Profile.
•
Communication Profile:
The Communication Profile contains the parameters relevant to communication,
e.g., identifier settings and PDO configuration settings. The device is equipped
with the encoder communication protocol (Device Profile for Encoder – DS406
Vers. 3.1). This enables devices from different manufacturers to be easily linked to
one another and replaced.
•
PDO transmission type:
By default, the PDO transmission type is set to asynchronous, i.e. the encoder
transmits its process data independently according to the configured cycle time.
The PDO transmission type can also be set in such a way that process data is only
sent after a SYNC message is received.
•
PDO object mapping:
The device does not support dynamic mapping or changing of the mapping para‐
meters. PDO1 transmits the position and speed.
•
Error messages:
The device automatically sends an emergency object when an error arises.
•
Device profile:
The parameters important to the operation of the encoder, such as position reso‐
lution, speed resolution, and cycle time, are stored in the Device Profile. Two
important operating parameters are:
°
Resolution:
The factory-default resolution of the device is 100 μm. The resolution for
motion speed is set to 1 mm/s by default. For more information, see the pro‐
gramming instructions.
°
Cycle time:
This setting is the cycle time for transmission of PDOs. The value can be in
the range of 1 ... 65535 ms. Programming the cycle time (object 6200) only
affects the PDO1 event timer (see DS406 V3.0).
The cycle time setting must match the setting configured for the CAN bus net‐
work. If the cycle time is too short, and the baud rate is low and there are
many subscribers, the bus can become overloaded due to the increased vol‐
ume of data.
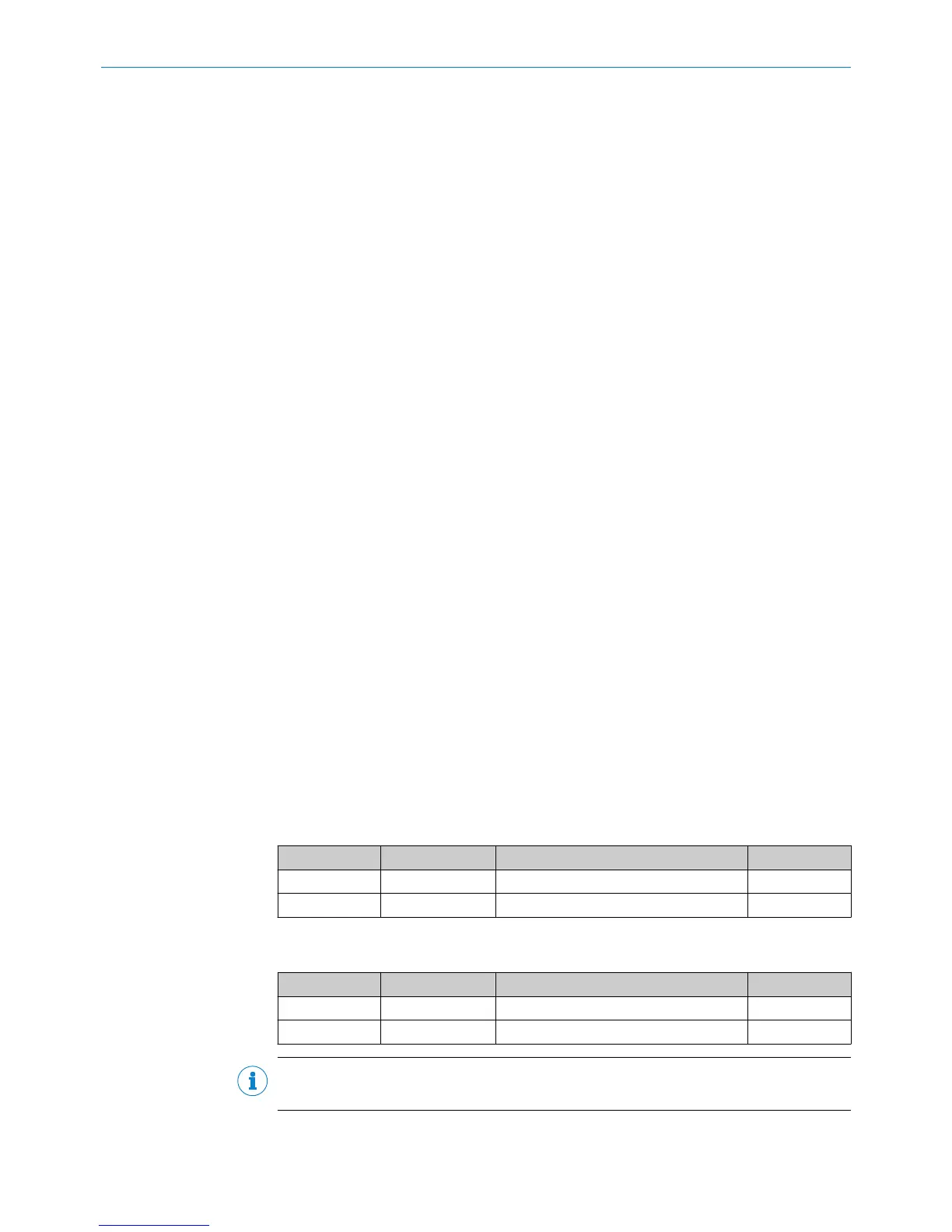
The cycle time can be set using the following commands (e.g., 10, node ID =
127*):
Table 30: Setting the cycle time
Data source COB-ID Data Destination
Controller 0x67f* 22; 00; 62; 00; 0A; 00; 00; 00 Sensor
Sensor 0x5ff* 60; 00; 62; 00; 00; 00; 00; 00 Controller
To permanently save the cycle time, the Save parameters command must be executed:
Table 31: Saving the cycle time
Data source
COB-ID Data Destination
Controller 0x67f* 22; 10; 10; 01; 73; 61; 76; 65 Sensor
Sensor 0x7ff* 60; 10; 10; 01; 00; 00; 00; 00 Controller
NOTE
The encoder may take up to 600 ms to respond.
COMMISSIONING 6
8022793/ZXZ4/2018-07-24 | SICK O P E R A T I N G I N S T R U C T I O N S | MAX
35
Subject to change without notice