Tables
12.4 List of predefined subprograms
Fundamentals
Programming Manual, 10.2004 Edition, 6FC5 298-7AB00-0BP1
12-57
12.4.2 Predefined subprogram calls in motion-synchronous actions
Predefined subprogram calls in motion-synchronous actions
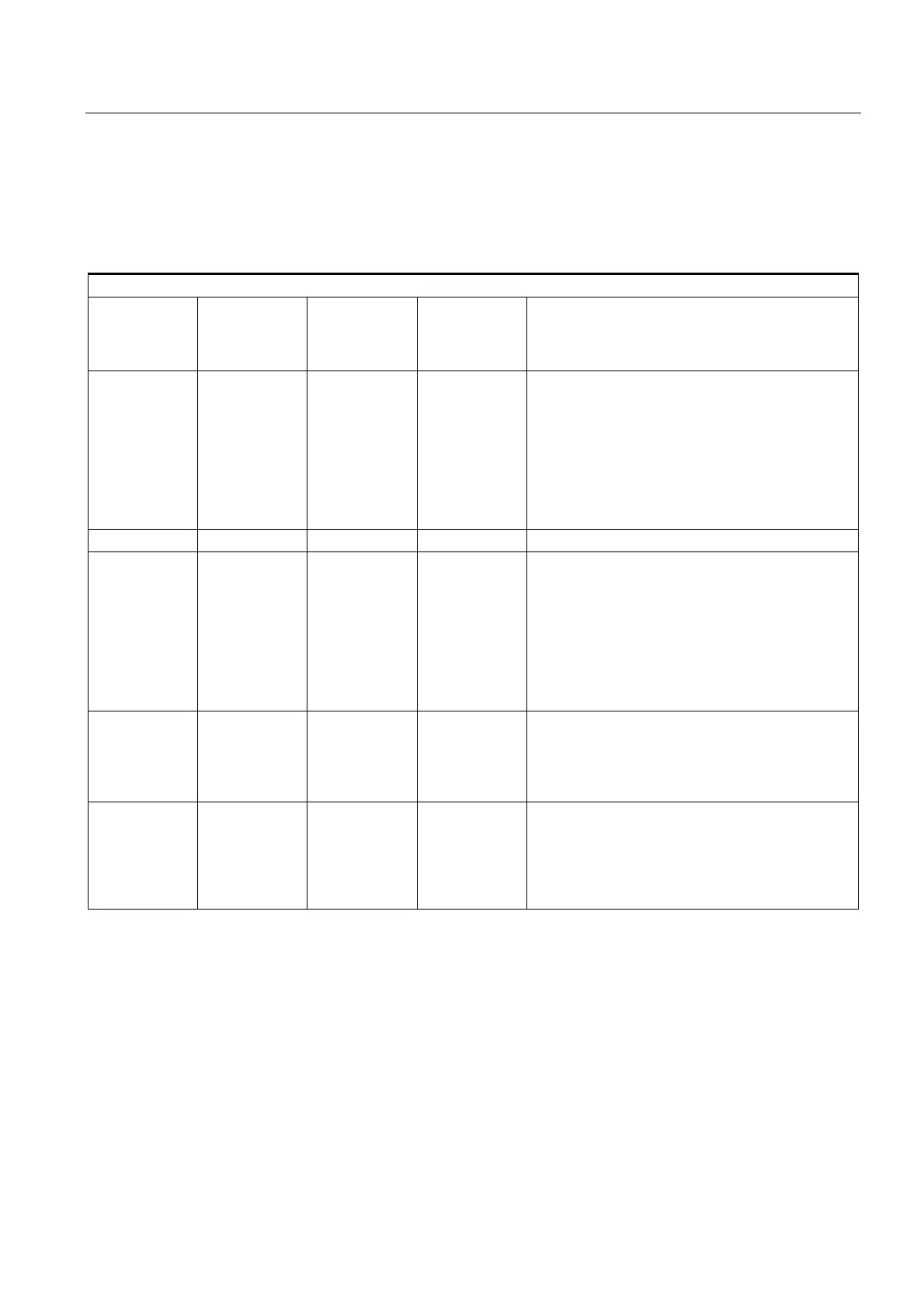
27. Synchronous procedures
Vocabulary
word/
function
identifier
1st parameter 2nd parameter 3rd parameter
to
5th parameter
Explanation
STOPREOF Stop preparation OFF:
A synchronized action with a STOPREOF
command causes a preprocessing stop after the
next output block (= block for the main run). The
preprocessing stop is canceled with the end of the
output block or when the STOPREOF condition is
fulfilled. All synchronized action instructions with the
STOPREOF command are therefore interpreted as
having been executed.
RDISABLE Read-in disable Read-in disable
DELDTG AXIS: Axis for
axial delete
distance-to-go
(optional). If the
axis is omitted,
delete distance-
to-go is
triggered for the
path distance
Delete distance-to-go:
A synchronized action with the DELDTG command
causes a preprocessing stop after the next output
block (= block for the main run). The preprocessing
stop is canceled with the end of the output block or
when the first DELDTG condition is fulfilled. The
axial distance to the destination point on an axial
delete distance-to-go is stored in $AA_DELT[axis];
the distance-to-go is stored in $AC_DELT.
SYNFCT INT: Number of
polynomial
function
defined with
FCTDEF.
VAR REAL:
Reference
variable*)
VAR REAL:
input variable**)
If the condition in the motion synchronous action is
fulfilled, the polynomial determined by the first
expression is evaluated at the input variable. The
upper and lower range of the value is limited and
the input variable is assigned.
FTOC INT: Number of
polynomial
function defined
with FCTDEF
VAR REAL:
input variable**)
INT: Length 1,
2, 3
INT: Channel
number
INT: Spindle
number
Modify tool fine compensation according to a
function defined with FCTDEF (polynomial no
higher than 3rd degree).
The number used here must be specified in
FCTDEF.
*) Only special system variables are permissible as result variables. These are described in
the Programming Guide Advanced in the section on "Write main run variable".
**) Only special system variables are permissible as input variables. These variables are
described in the Programming Guide Advanced in the list of system variables.
 Loading...
Loading...











