Detailed Description
2.4 Referencing with incremental measurement systems
Reference Point Approach (R1)
2-18 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
Features of phase 3
• Feed override active
• The feed stop (channel-specific and axis-specific) is active
• NC-STOP and NC-START are active
Special feature of phase 3
If the assigned distance between the encoder zero mark and the reference point, i.e., the
sum of the reference point distance and the reference point offset:
MD34080 $MA_REFP_MOVE_DIST (reference point distance)
MD34090 $MA_REFP_MOVE_DIST_CORR (reference point offset)
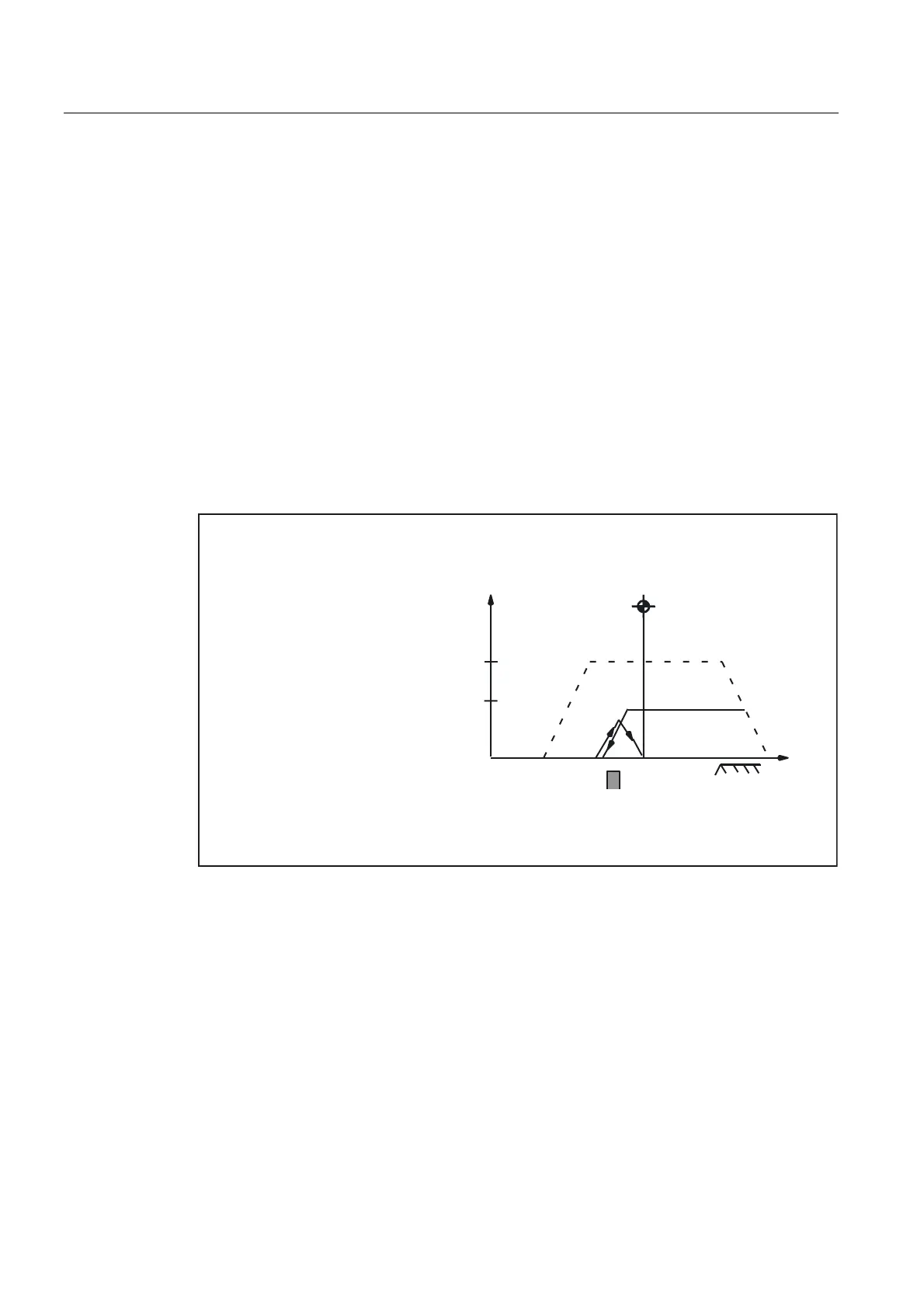
is less than the deceleration distance that is needed to stop the axis on the reference point
based on the reference point positioning velocity:
MD34070 $MA_REFP_VELO_POS (reference point positioning velocity)
the machine axis first stops "behind" the reference point and then moves back to the
reference point.
UHIHUHQFHSRLQWDSSURDFKYHORFLW\
5HIHUHQFH
SRLQW
FDP
'HFHOHUDWLRQ
RIUHIHUHQFH
SRLQWDSSURDFK
9HORFLW\
UHIHUHQFHSRLQWFUHHSYHORFLW\
=HUR
PDUN
UHIHUHQFHSRLQWYDOXH
'LV
WDQFH
0'5()3B6(7B326>RU@
([DPSOH0'5()3B029(B',675()3B6(7B326B&255 =(52
0'5()3B9(/2B6($5&+B0$5.(5
0'5()3B9(/2B6($5&+B&$0
Fig. 2-10 Reference point distance plus reference point offset smaller than braking distance
 Loading...
Loading...














