Detailed Description
2.4 Closed-loop control
Velocities, Setpoint/Actual-Value Systems, Closed-Loop Control (G2)
2-54 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2.4.2 Parameter sets of the position controller
Six different parameters sets
The position control can operate with 6 different servo parameter sets.
They are used as follows
1. Fast adaptation of the position control to altered machine characteristics during operation,
e.g. a gear change of the spindle.
2. Matching the dynamics of an axis to another axis, e.g. during tapping.
Parameter set changeover
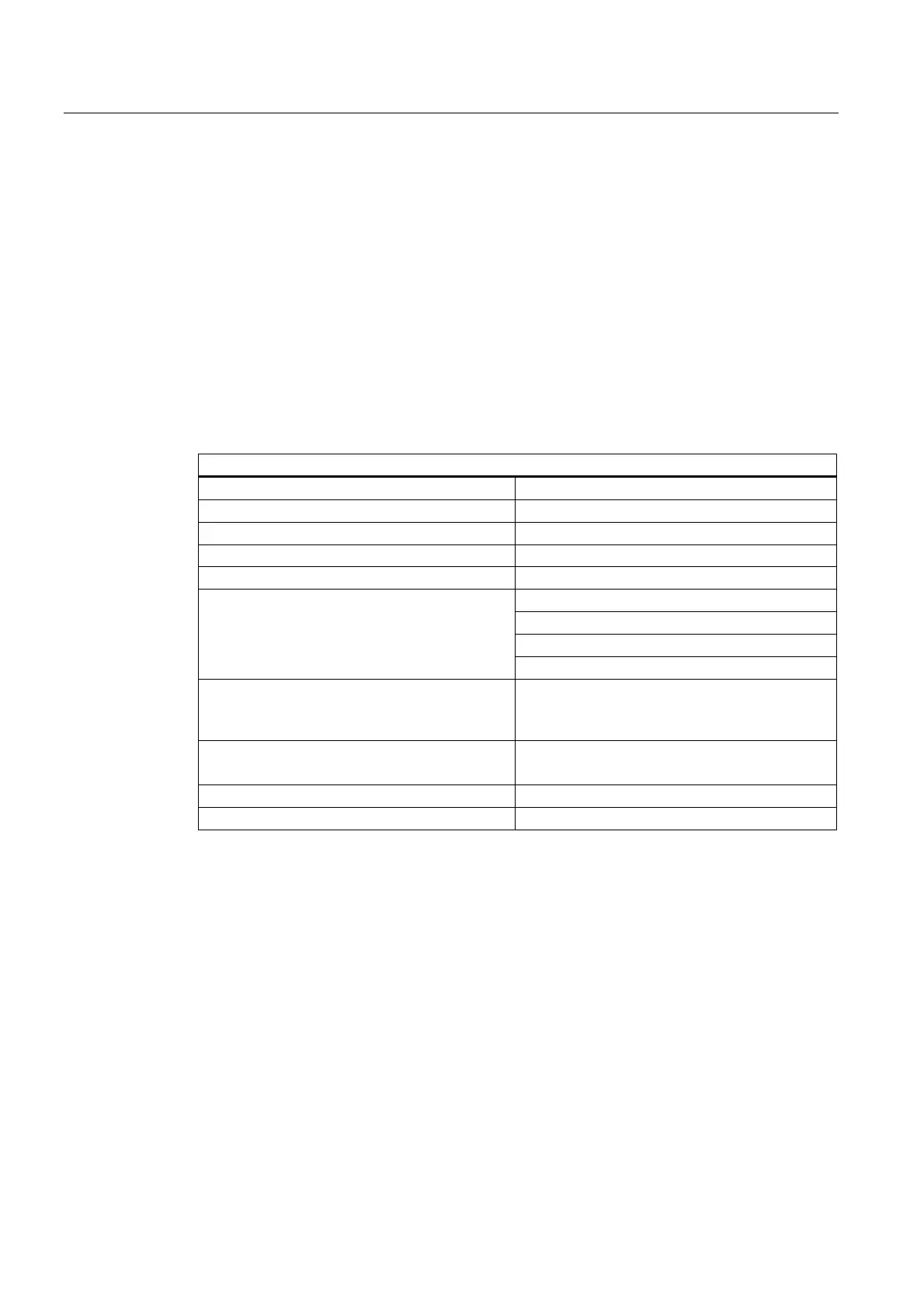
The following machine data can be changed by switching over the parameter set during operation:
Denominator load gearbox MD31050 $MA_DRIVE_AX_RATIO_DENOM[n]
Numerator load gearbox MD31060 $MA_DRIVE_AX_RATIO_NUMERA[n]
K
v
factor MD32200 $MA_POSCTRL_GAIN[n]
Backlash compensation MD32452 $MA_BACKLASH_FACTOR[n]
Feedforward control factor MD32610 $MA_VELO_FFW_WEIGHT[n]
MD36012 $MA_STOP_LIMIT_FACTOR[n]
MD36000 $MA_STOP_LIMIT_COARSE
MD36010 $MA_STOP_LIMIT_FINE
Exact stop limits
and zero-speed window
MD36030 $MA_STANSTILL_POS_TOL
Equivalent time constant
current control loop for torque feedforward
control
MD32800 $MA_EQUIV_CURRCTRL_TIME[n]
Equivalent time constant
speed control loop for speed feedforward control
MD32810 $MA_EQUIV_SPEEDCTRL_TIME[n]
Time constant for dynamic response adaptation MD32910 $MA_DYN_MATCH_TIME[n]
Threshold value for velocity monitoring MD36200 $MA_AX_VELO_LIMIT[n]
 Loading...
Loading...














