Detailed Description
2.3 Feedrate control
Feeds (V1)
2-44 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
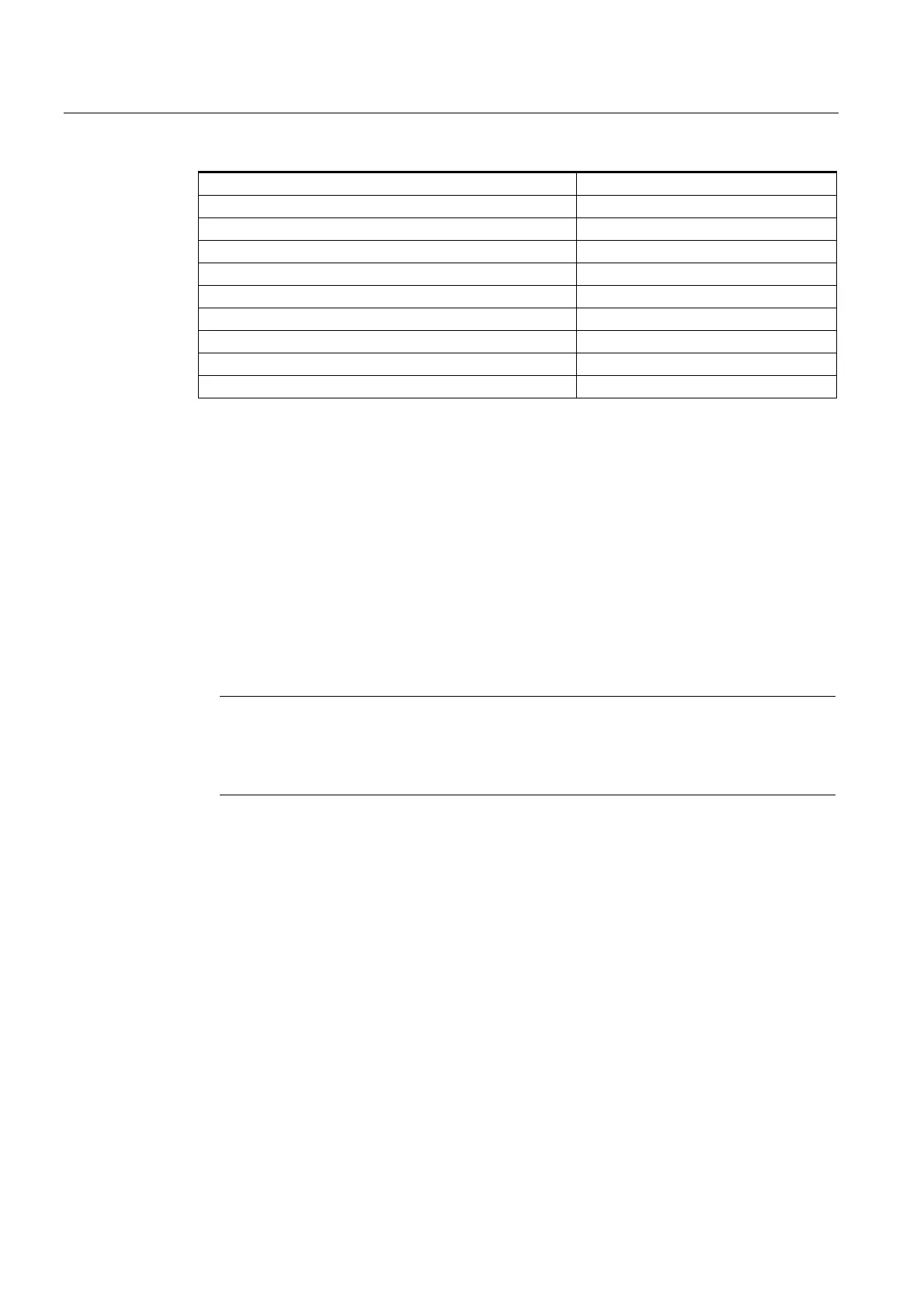
31050 DRIVE_AX_RATIO_DENOM[n] Parameter set n for 0 to 5
31060 DRIVE_AX_RATIO_NUMERA[n] Parameter set n for 0 to 5
32200 POSCTRL_GAIN[n] Parameter set n for 0 to 5
32452 BACKLASH_FACTOR[n] Parameter set n for 0 to 5
32610 VELO_FFW_WEIGHT[n] Parameter set n for 0 to 5
32800 EQUIV_CURRCTRL_TIME[n] Parameter set n for 0 to 5
32810 EQUIV_SPEEDCTRL_TIME[n] Parameter set n for 0 to 5
32910 DYN_MATCH_TIME[n] Parameter set n for 0 to 5
36012 STOP_LIMIT_FACTOR[n] Parameter set n for 0 to 5
36200 AX_VELO_LIMIT[n] Parameter set n for 0 to 5
For more information about parameter sets and programming, please refer to:
References:
/FB/ Description of Functions, Basic Machine; Speeds, Setpoint/Actual-Value Systems,
Closed-Loop Control (G2)
/PG/ Programming Guide, Fundamentals; Path Response and Feed Control
Dynamic criteria and feedforward control
With dynamic response criteria, it must be distinguished from where they were set:
• In the part program
or
• From a main-run interpolation (synchronized action or PLC default)
Note
Changes in the dynamic response made in a part program do not affect command axis or
PLC axis movements.
Changes from synchronized actions do not affect the movements from a part program.
Travel with feedforward control ON/OFF
The type of feedforward control and the path axes to which feedforward is to be applied are
determined:
• Programmable in the part program with FFWON/ FFWOF for axes selected using machine
data.
• Only indirectly programmable in synchronized actions (ASUB).
• Only indirectly programmable from the PLC (ASUB).
 Loading...
Loading...














