Detailed Description
2.4 Tool: Tool radius compensation 2D (TRC)
Tool Compensation (W1)
2-42 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
3
5 7RROUDGLXV
*FRUUHFWHG
3
&RQWRXU VWUDLJKWOLQH
%HKLQG
FRQWRXU
,QIURQWRI
FRQWRXU
3
*
3
3
*
3
55
5
&RQWRXU2.
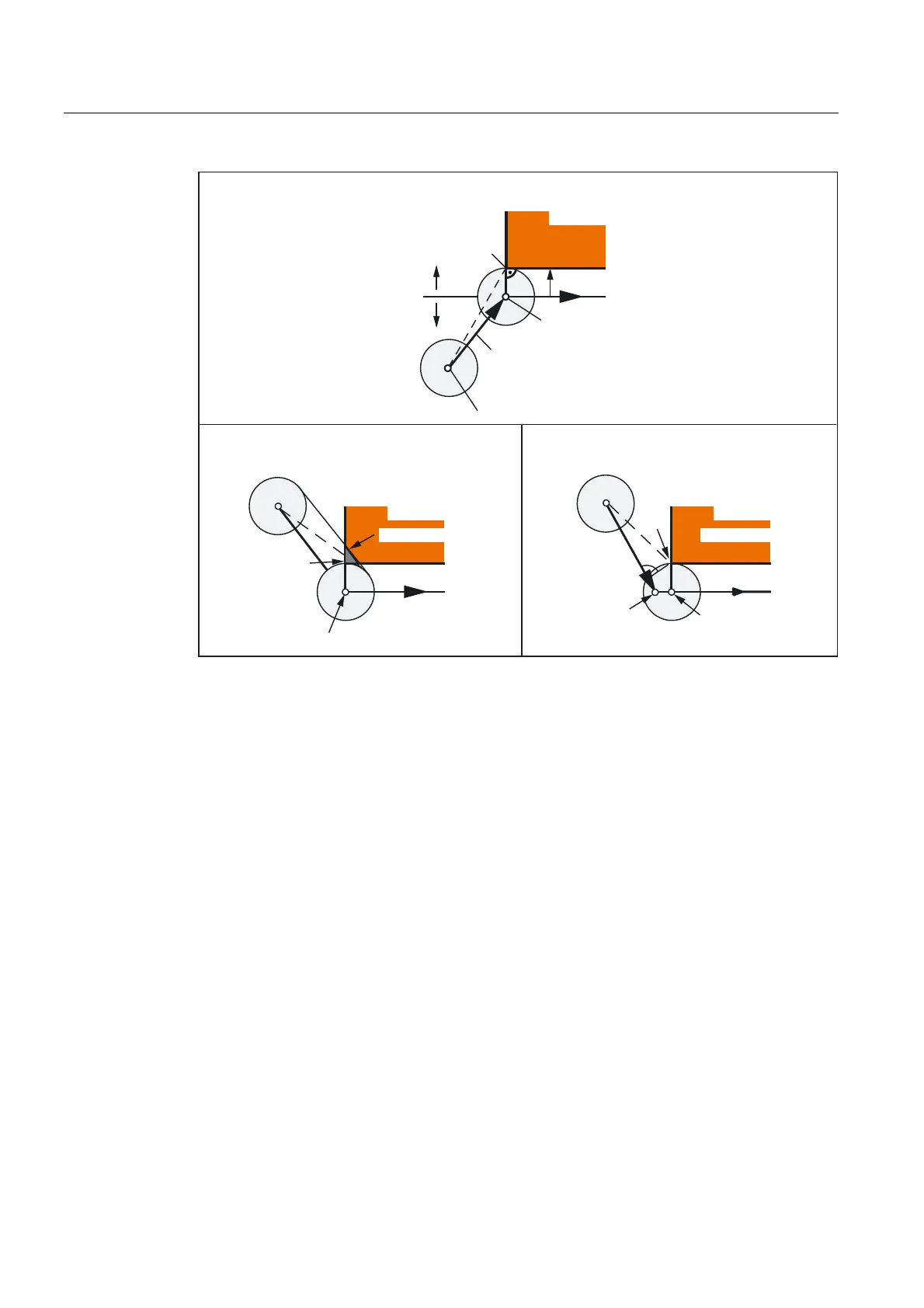
([DPSOHRIVHOHFWLQJ75&ZLWK1250
EHKLQGWKHFRQWRXU
([DPSOHRIVHOHFWLQJ75&ZLWK.217
EHKLQGWKHFRQWRXUDQG*
&RQWRXUYLRODWLRQ
3
3
3
3
Fig. 2-15 Example for selecting TRC with KONT or NORM in front of and behind the contour
• KONT and G450/G451 (corner behavior at outer corners) has a general effect and
determines the approach and retraction behavior with TRC.
• When tool radius compensation is deselected, the retraction behavior is determined by
the NORM/KONT instructions.
Supplementary conditions
The approach and retraction blocks are polynomials in the following two variants. Therefore,
they are only available for control variants, which support polynomial interpolation.
• KONTT
With KONTT, approach and retraction to/from the contour is with a constant tangent. The
curvature at the block transition is not usually constant.
• KONTC
With KONTC, not only the tangent but also the curvature is constant at the transition, with the
result that a jump in acceleration can no longer occur on activation/deactivation.
Although KONTC includes the KONTT property, the constant tangent version KONTT is
available on its own, because the constant curvature required by KONTC can produce
undesired contours.
 Loading...
Loading...














