Detailed Description
2.4 Tool: Tool radius compensation 2D (TRC)
Tool Compensation (W1)
Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2-47
Approach movement
A maximum of 4 sub-movements:
• Start point of the movement P
0
• Intermediate points P
1
, P
2
and P
3
• End point P
4
Points P
0
, P
3
and P
4
are always defined. Intermediate points P
1
and P
2
can be omitted,
according to the parameters defined and the geometrical conditions.
Retraction movement
On retraction, the points are traversed in the reverse direction, i.e., starting at P
4
and ending
at P
0
.
Parameters
The response of the smooth approach and retraction function is determined by up to 9
parameters:
• Non-modal G code for defining the approach and retraction contour
This G code cannot be omitted.
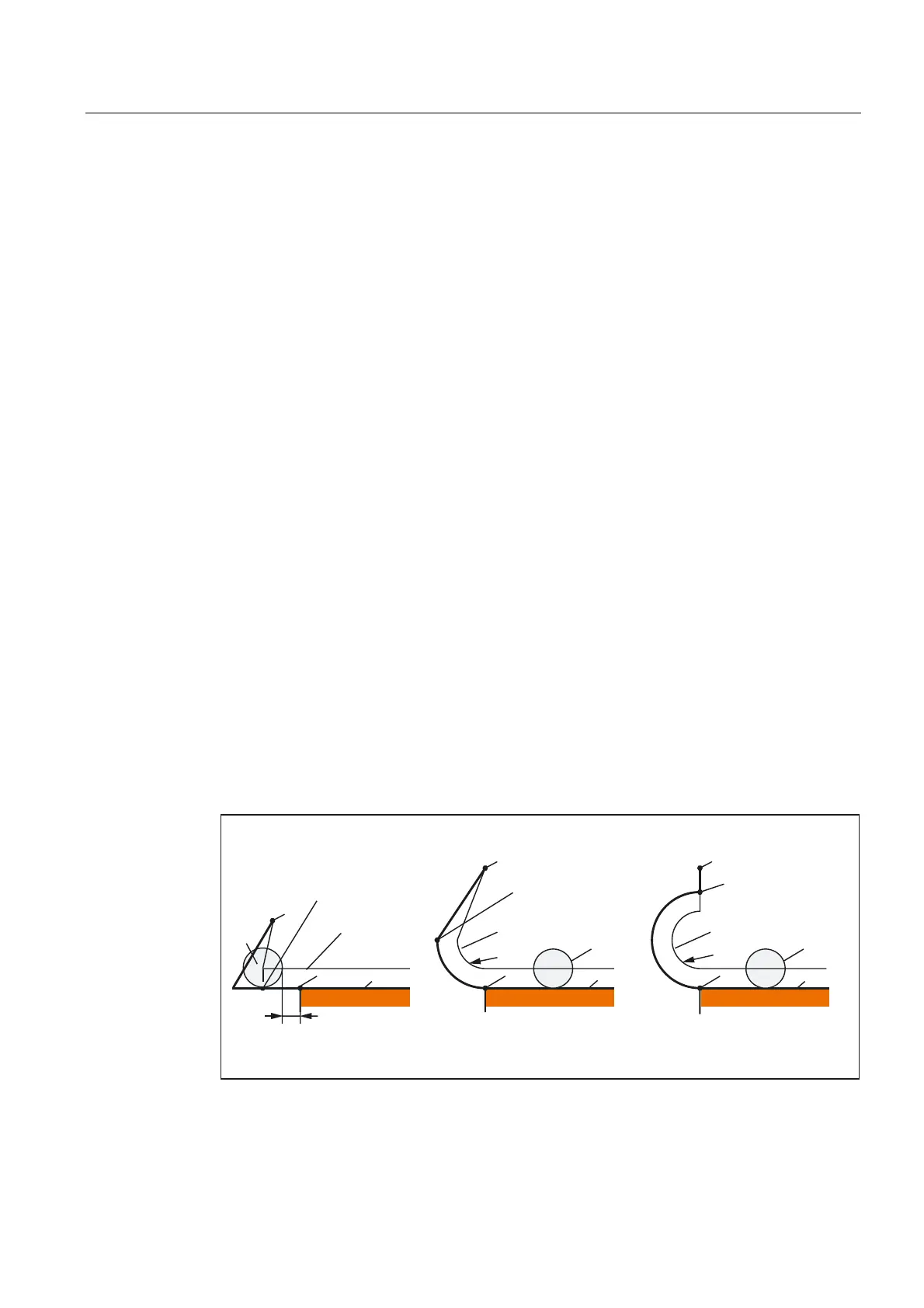
– G147: Approach with a straight line
– G148: Retraction with a straight line
– G247: Approach with a quadrant
– G248: Retraction with a quadrant
– G347: Approach with a semicircle
– G348: Retraction with a semicircle
3ZKHQDSSURDFKLQJ
ZLWKDVWUDLJKWOLQH
*
3ZKHQDSSURDFKLQJ
ZLWKDTXDGUDQW
*
3ZKHQDSSURDFKLQJ
ZLWKDVHPLFLUFOH
*
7RROFHQWHUSRLQW
SDWK
7RROFHQWHUSDWK7RROFHQWHUSDWK
7RRO
7RRO
&RQWRXU
&RQWRXU
&RQWRXU
7RRO
3
3
',65
3
',65
3
',65
3
3
Fig. 2-19 Approach behavior depending on G147 to G347 and DISR (with simultaneous activation
of tool radius compensation)
 Loading...
Loading...














