Detailed Description
2.5 Toolholder with orientation capability
Tool Compensation (W1)
Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2-85
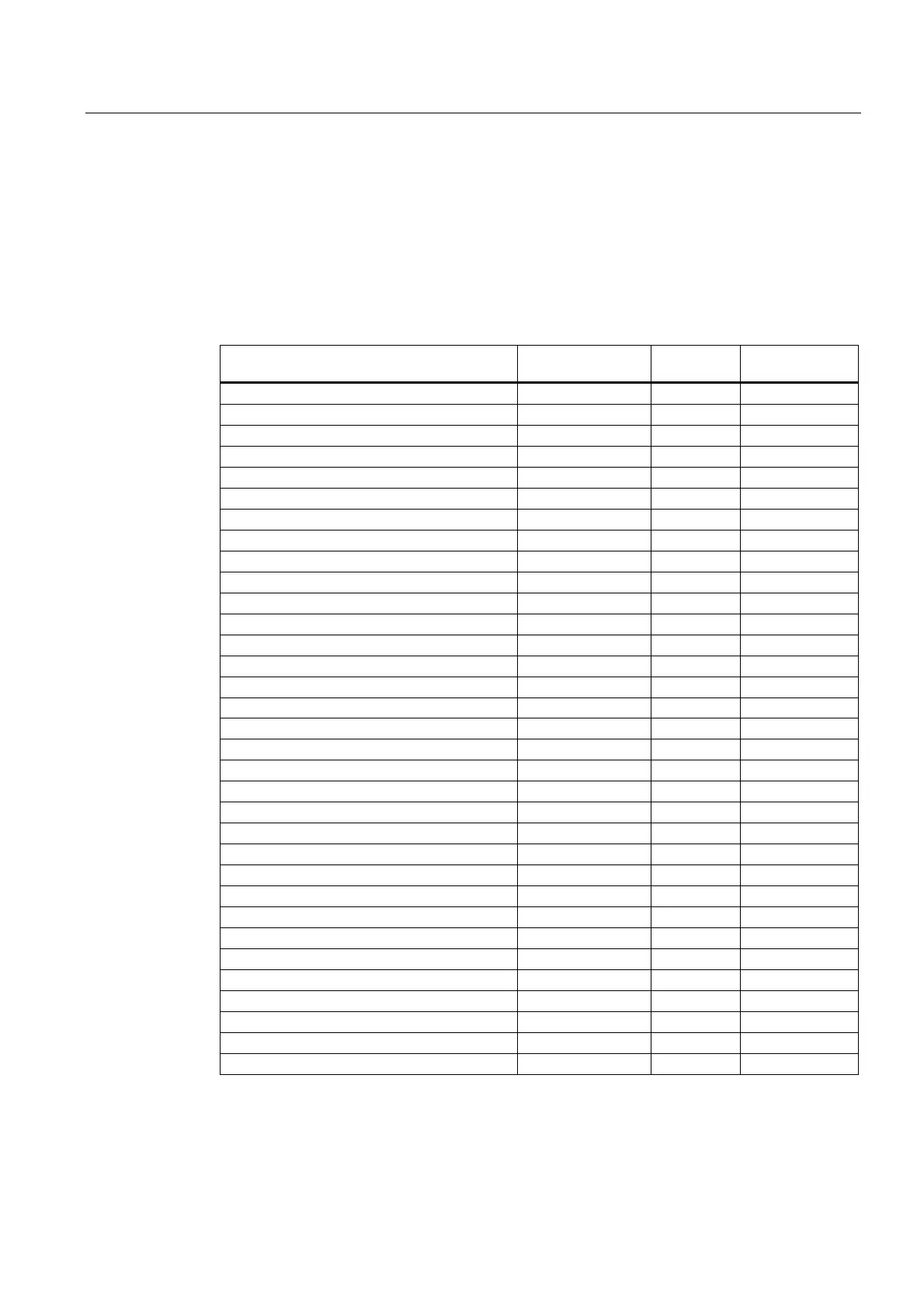
System variables for toolholders with orientation capability
$TC_CARRn[m]
n: Parameters 1 to 33
m: Number of toolholder with orientation capability 1...value of MD18088
$MN_MM_NUM_TOOL_CARRIER
Description NCK variables Language
format
Preassignment
x component of offset vector l
1
$TC_CARR1 REAL 0
y component of offset vector l
1
$TC_CARR2 REAL 0
z component of offset vector l
1
$TC_CARR3 REAL 0
x component of offset vector l
2
$TC_CARR4 REAL 0
y component of offset vector l
2
$TC_CARR5 REAL 0
z component of offset vector l
2
$TC_CARR6 REAL 0
x component of rotary axis v
1
$TC_CARR7 REAL 0
y component of rotary axis v
1
$TC_CARR8 REAL 0
z component of rotary axis v
1
$TC_CARR9 REAL 0
x component of rotary axis v
2
$TC_CARR10 REAL 0
y component of rotary axis v
2
$TC_CARR11 REAL 0
z component of rotary axis v
2
$TC_CARR12 REAL 0
Angle of rotation α1(in degrees) $TC_CARR13 REAL 0
Angle of rotation α
2
(in degrees) $TC_CARR14 REAL 0
x component of offset vector l
3
$TC_CARR15 REAL 0
y component of offset vector l
3
$TC_CARR16 REAL 0
z component of offset vector l
3
$TC_CARR17 REAL 0
x component of offset vector l
4
$TC_CARR18 REAL 0
y component of offset vector l
4
$TC_CARR19 REAL 0
z component of offset vector l
4
$TC_CARR20 REAL 0
Axis identifier of the rotary axis v
1
$TC_CARR21 AXIS 0
Axis identifier of the rotary axis v
2
$TC_CARR22 AXIS 0
Kinematic type $TC_CARR23 CHAR T
Offset of rotary axis v
1
$TC_CARR24 REAL 0
Offset of rotary axis v
2
$TC_CARR25 REAL 0
Angle offset of rotary axis v
1
(Hirth tooth) $TC_CARR26 REAL 0
Angle offset of rotary axis v
2
(Hirth tooth) $TC_CARR27 REAL 0
Angle increment of rotary axis v
1
(Hirth tooth) $TC_CARR28 REAL 0
Angle increment of rotary axis v
2
(Hirth tooth) $TC_CARR29 REAL 0
Minimum position of rotary axis v
1
(SW limit) $TC_CARR30 REAL 0
Minimum position of rotary axis v
2
(SW limit) $TC_CARR31 REAL 0
Maximum position of rotary axis v
1
(SW limit) $TC_CARR32 REAL 0
Maximum position of rotary axis v
2
(SW limit) $TC_CARR33 REAL 0
 Loading...
Loading...














