Detailed Description
2.5 Toolholder with orientation capability
Tool Compensation (W1)
Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2-97
System variable $P_TCANG[i] delivers the approximated valued and system variable
$P_TCDIFF[i] the difference between the exact and the approximated value.
Frame orientation TCOFR
With TCOFR (determination of the angle from the orientation defined by an active frame), the
increments are scaled after determination of the angle from the active frame rotation. If the
requested orientation is not possible due to the machine kinematic, the machining is aborted
with an alarm. This also applies if the target orientation is very close to an achievable
orientation. In particular the alarm in such situations cannot be prevented through the angle
approximation.
TCARR frame offset
A frame offset as a result of a toolholder change becomes effective immediately on selection
of TCARR=.... A change in the tool length, on the other hand, only becomes effective
immediately if a tool is active.
TCOFR/TCOABS frame rotation
A frame rotation does not take place on activation and a rotation, which is already active, is
not changed. As in case T (only the tool can be rotated), the position of the rotary axes used
for the calculation is dependent on the G code TCOFR/TCOABS and determined from the
rotation component of an active frame or from the entries $TC_CARRn.
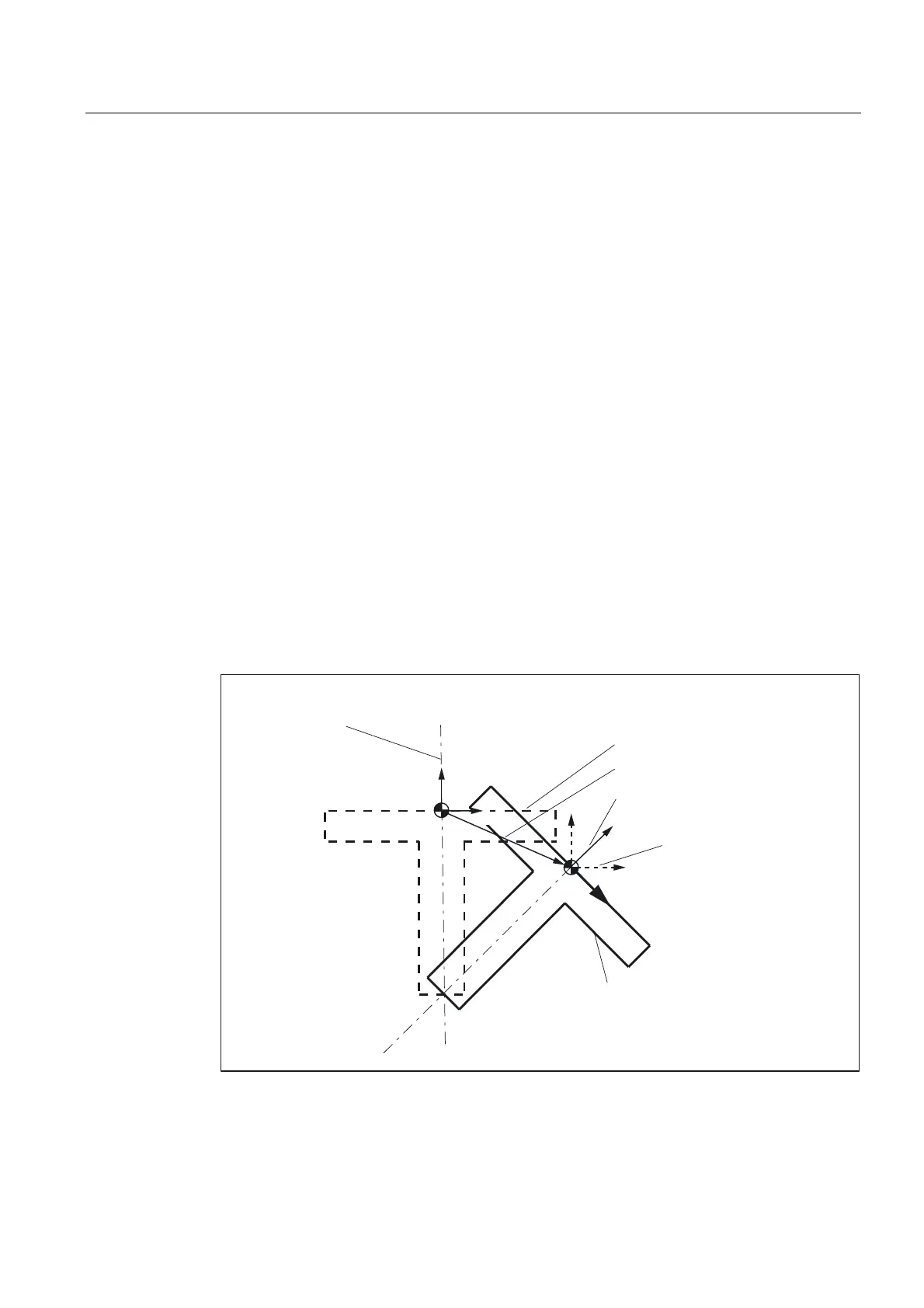
Activation of a frame changes the position in the workpiece coordinate system accordingly,
without compensating movement by the machine itself. The ratios are shown in the figure
below:
2ULJLQDOSRVLWLRQRIWDEOH
3RVLWLRQRIWDEOHDIWHUURWDWLRQ
)UDPHRIIVHW
3RVLWLRQRIFRRUGLQDWHV\VWHP
DIWHU3$527
3RVLWLRQRIFRRUGLQDWHV\VWHP
DIWHU7&$55
2ULJLQDOSRVLWLRQRI
WKHFRRUGLQDWH
V\VWHP
=
;
=
;
=
;
Fig. 2-46 Zero offset on activation of a rotary table with TCARR
 Loading...
Loading...














