Detailed Description
2.3 Setpoint/actual-value system
Velocities, Setpoint/Actual-Value Systems, Closed-Loop Control (G2)
Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2-45
⇒ MD30300 $MA_IS_ROT_AX = 0
MD31000 $MA_ENC_IS_LINEAR[0] = 0
MD31040 $MA_ENC_IS_DIRECT[0] = 0
MD31020 $MA_ENC_RESOL[0] = 2048
MD31030 $MA_LEADSCREW_PITCH = 10
MD31080 $MA_DRIVE_ENC_RATIO_NUMERA[0] = 1
MD31070 $MA_DRIVE_ENC_RATIO_DENOM[0] = 1
MD31060 $MA_DRIVE_AX_RATIO_NUMERA[0] = 5
MD31050 $MA_DRIVE_AX_RATIO_DENOM[0] = 1
MD10200 $MN_INT_INCR_PER_MM = 10000
PPLQFUPP
,QWHUQDOLQFUHPHQWVPP
(QFRGHULQFUHPHQWVPP
Result:
1 encoder increment corresponds to 0.004768 increments of the internal unit. In practice, the
available encoder resolution should not be resolved more accurately than the internal
computational resolution.
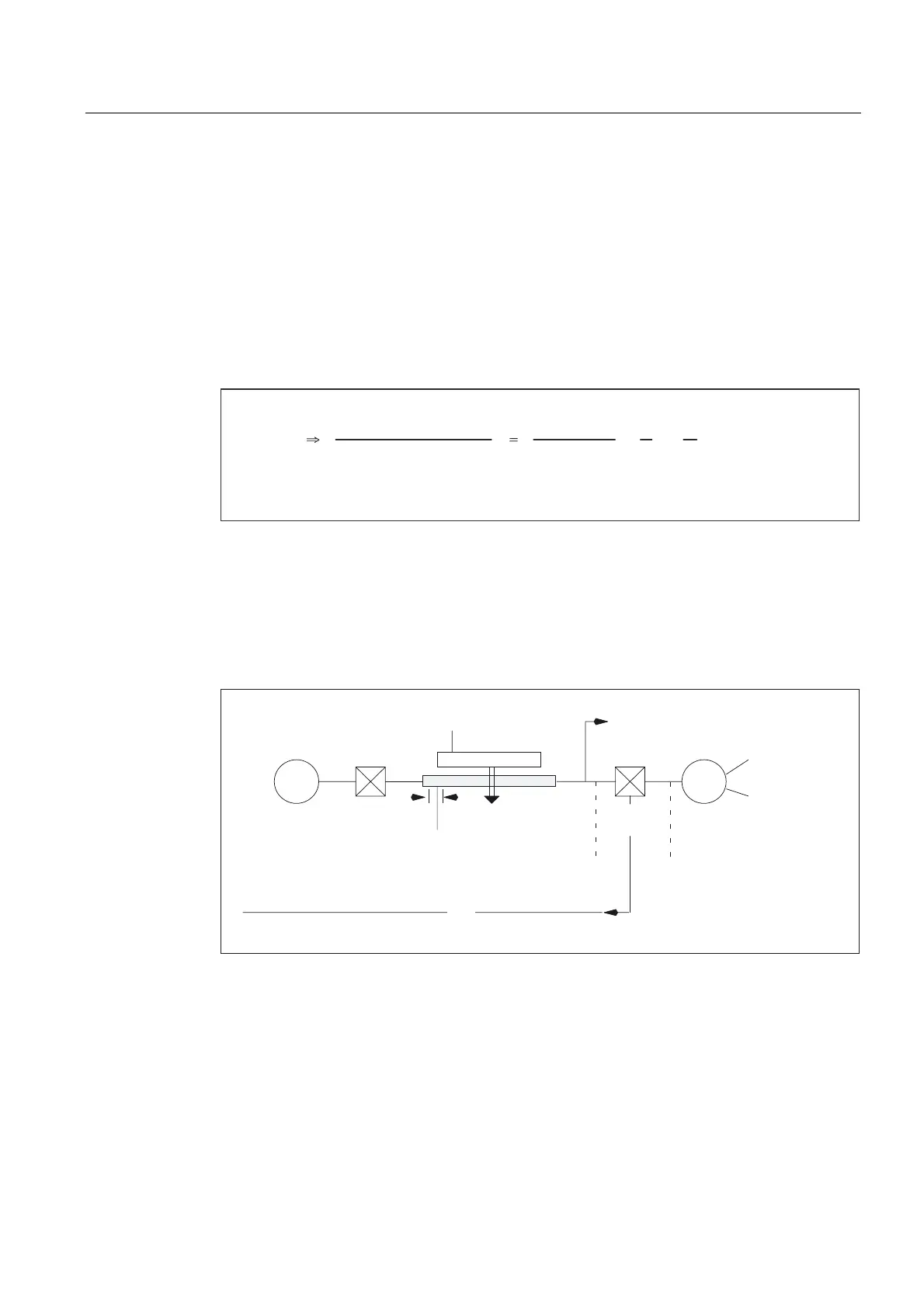
Linear axis with rotary encoder on the machine
,6B527B$;
Q
Q
'5,9(B(1&B5$7,2B180(5$
'5,9(B(1&B5$7,2B'(120
/($'6&5(:B3,7&+
(1&B,6B',5(&7
(1&B5(62/
(1&B,6B/,1($5
*
0
1RRIVSLQGOHUHYV
1RRIHQFRGHUUHYV
/RDG
JHDU
6SLQGOH
0HDV
JHDU
%DOOVFUHZ
7DEOH
(QFRGHU
Fig. 2-8 Linear axis with rotary encoder on the machine
 Loading...
Loading...














