Detailed Description
2.5 Workpiece-related actual-value system
Axis Types, Coordinate Systems, Frames (K2)
2-116 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
)UDPHIRUF\FOHVSURJUDPPDEOH
IUDPHWUDQVIRUPDWLRQV
+RPHSRVLWLRQRIIVHW
)UDPHFKDLQ
6=6 6HWWDEOH=HUR6\VWHP
%=6 %DVLF=HUR6\VWHP
:&6 :RUNSLHFH&RRUGLQDWH6\VWHP
%&6 %DVLF&RRUGLQDWH6\VWHP
0&6 0DFKLQH&RRUGLQDWH6\VWHP
&KDLQHGV\VWHPIUDPHVIRU3$52735(6(7
VFUDWFKLQJ]HURRIIVHWH[WHUQDO
&KDLQHGILHOGRIEDVLFIUDPHV
FKDQQHOVSHFDQGRU1&8JOREDO
*WR*VHWWDEOHIUDPH
FKDQQHOVSHFRU1&8JOREDO
6\VWHPIUDPHIRU72527
72)5$0(ZRUNSLHFHV
%&6
%=6
6=6
:&6
0&6
+DQGZKHHO'5)RIIVHWVXSHULPSRVHGPRYHPHQW
]HURRIIVHWH[WHUQDO
.LQHPDWLFWUDQVIRUPDWLRQ
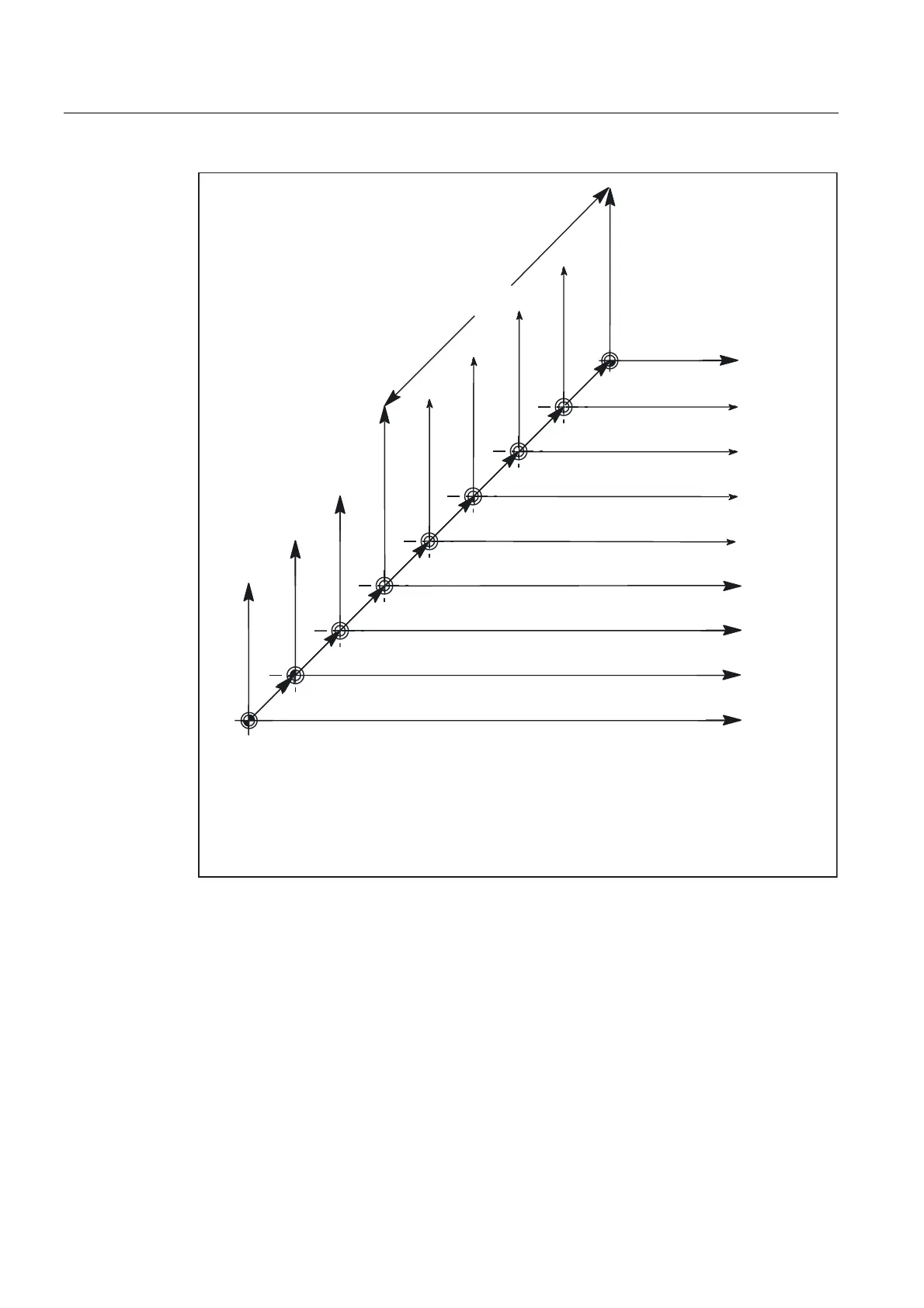
Fig. 2-26 Interrelationship between coordinate systems
References:
/PG/ Programming Guide, Fundamentals
/FB1/ Description of Functions, Basic Machine; Tool Offset (W1)
/FB1/ Description of Functions, Basic Machine; Auxiliary Function Outputs to PLC (H2)
/FB2/ Description of Functions, Expansion Functions; Kinematic Transformation (M1)
/FB3/ Description of Functions, Special Functions; Axis Couplings and ESR (M3);
Chapter: Coupled Motion, Chapter: Master Value Coupling
/FB3/ Description of Functions, Special Functions; Tangential Control (T3)
 Loading...
Loading...














