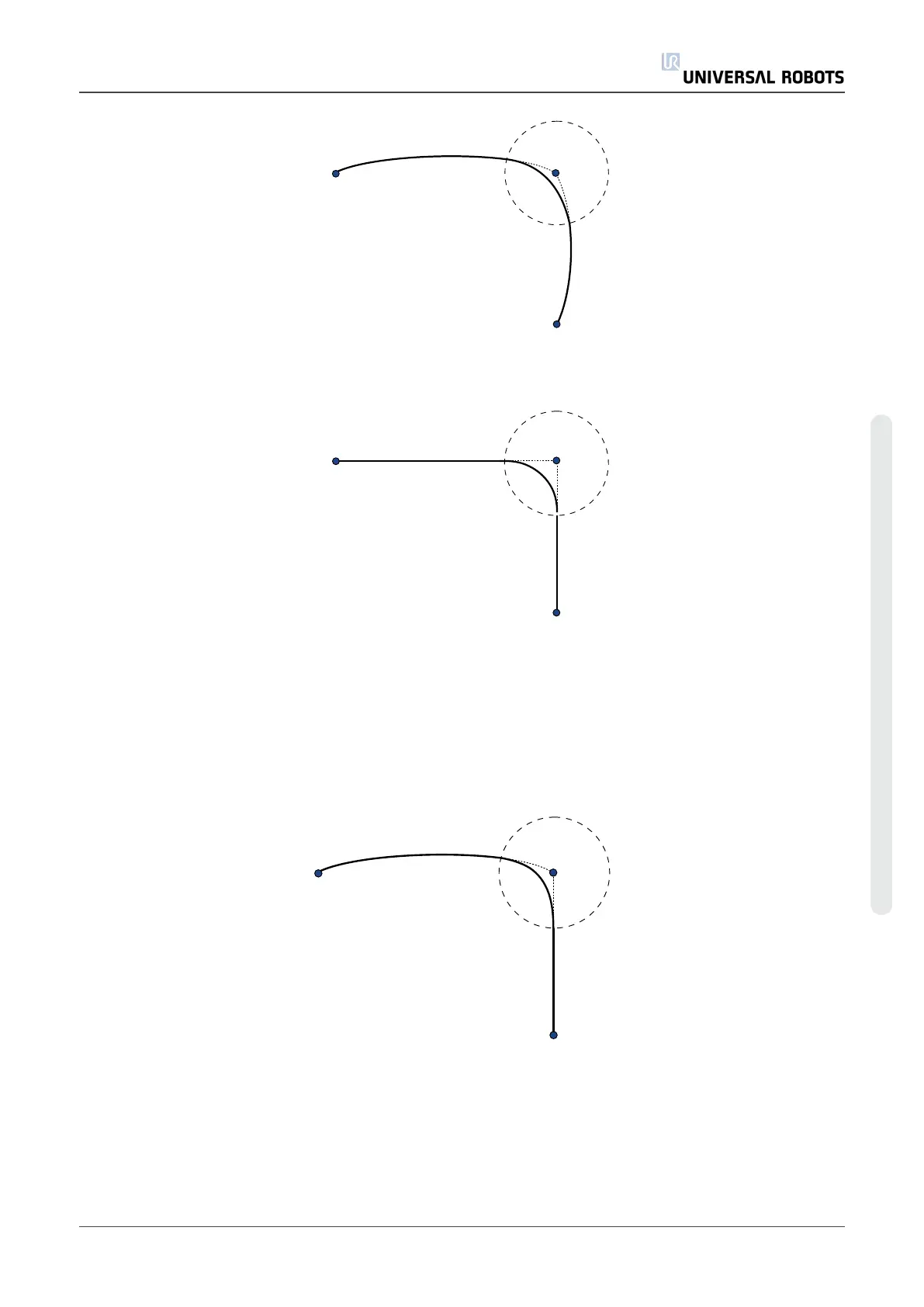
16.6:Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend.
Of the different combinations, bullets 2, 3 and 4 will result in trajectories that keep within the
boundaries of the original trajectory in Cartesian space. An example of a blend between different
trajectory types (bullet 2) can be seen in figure 16.7.
16.7:Blending from a movement in joint space (MoveJ) to linear tool movement (MoveL).
User Manual 169 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.