Wecon VD2 SA Series Servo Drives Manual (Lite V1.1)
WECON technology Co., Ltd
6. Parameters
Group P00 Basic settings
Used to set the control mode of servo drive
For position control parameter setting, please refer to full version manual V1.1
“6.2 Position control mode”.
For speed control parameter setting, please refer to full version manual V1.1 “6.3
Speed control mode”.
For torque control parameter setting, please refer to full version manual V1.1 “6.4
Torque control mode”.
Position/speed
mix control
A DI terminal of the servo drive needs to be assigned to function 17 (MixModeSel,
mixed mode selection), and the DI terminal logic is determined to be valid.
MixModeSel terminal logic
Position/torque
mix control
A DI terminal of the servo drive needs to be assigned to function 17 (MixModeSel,
mixed mode selection), and the DI terminal logic is determined to be valid.
MixModeSel terminal logic
A DI terminal of the servo drive needs to be assigned to function 17 (MixModeSel,
mixed mode selection), and the DI terminal logic is determined to be valid.
MixModeSel terminal logic
When P00-01 is set to 4, 5 or 6, please refer to full version manual V1.1 “6.5 Mixed control mode”.
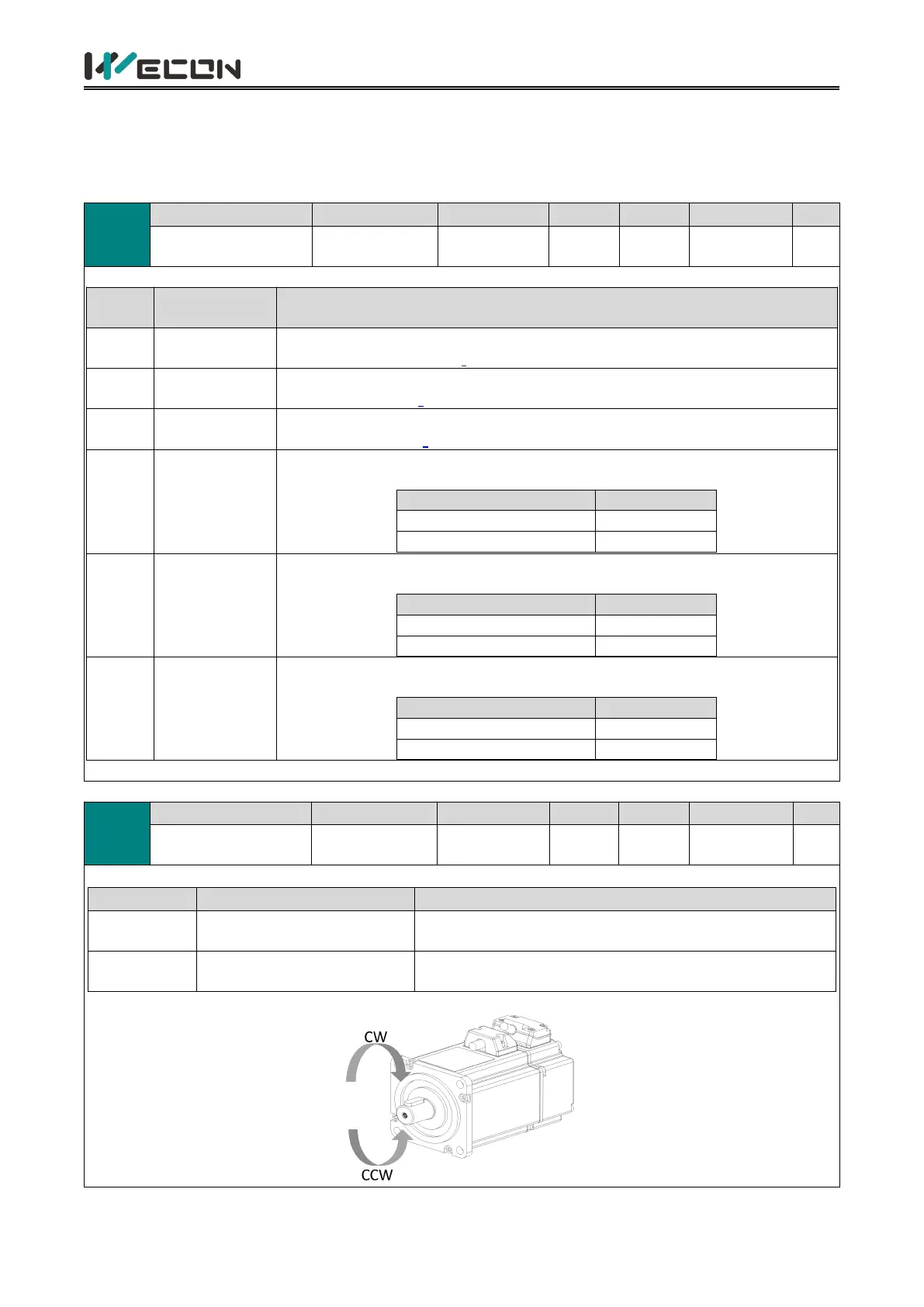
Set the forward rotation direction of the motor when looking at the motor axis.
Take CW as forward direction
When looking at the motor axis, the rotation direction of the
motor is clockwise
Take CCW as forward direction
When looking at the motor axis, the rotation direction of the
motor is anticlockwise
 Loading...
Loading...