Wecon VD2 SA Series Servo Drives Manual (Lite V1.1)
WECON technology Co., Ltd
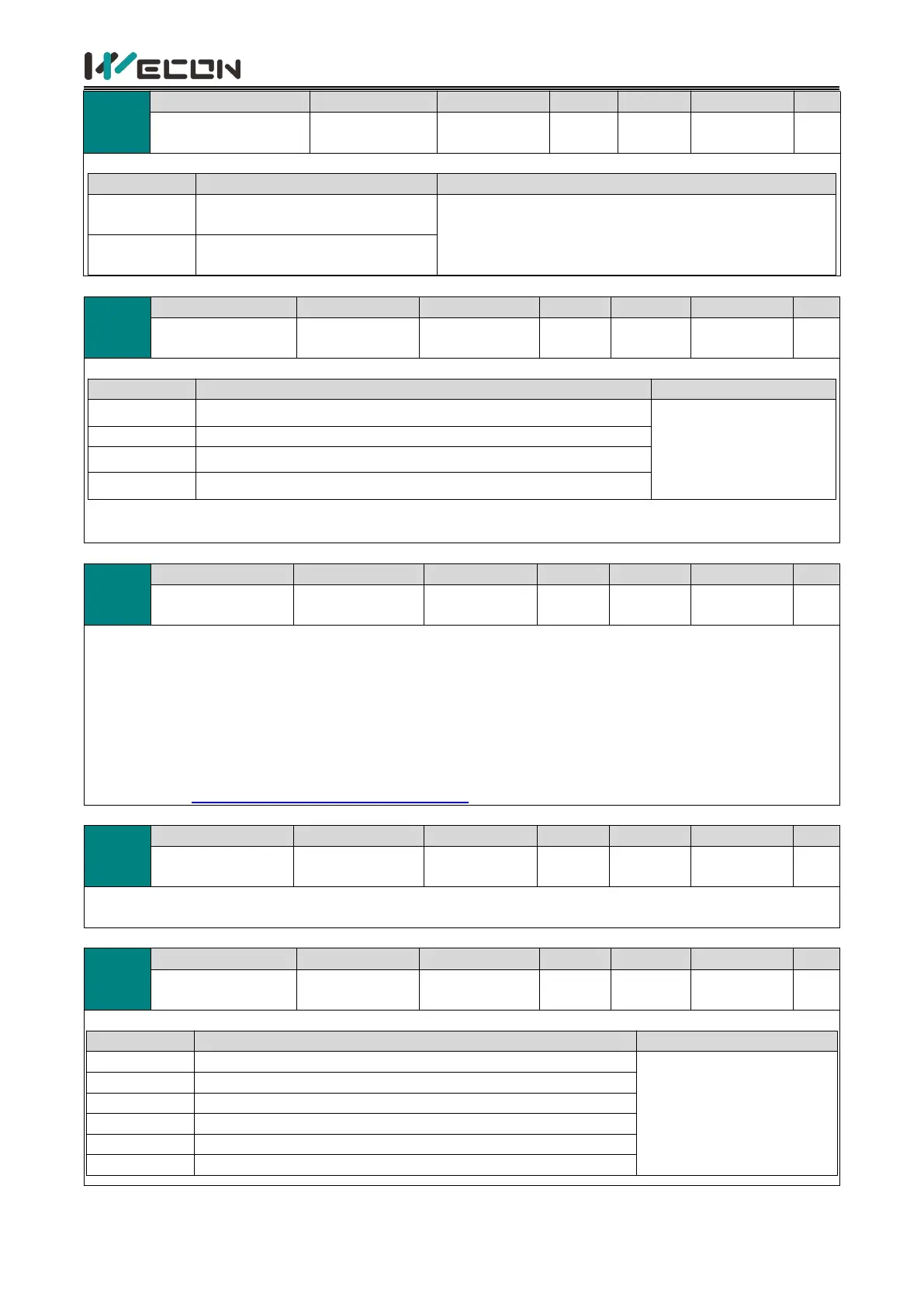
Set the forward rotation direction of the motor when looking at the motor axis.
Free shutdown.
The motor shaft remains free
Please set reasonable shutdown according to the
machinery and running requirement. Please refer to full
version manual V1.1 “6.1.7 Servo shutdown”.
Zero-speed shutdown.
The motor shaft remains free
Used to set the way in which braking energy is absorbed and released.
Use built-in braking resistor
Please refer to full
version manual V1.1
“6.1.5 Braking resistor”
to choose the right
braking method
Use external braking resistor and natural cooling
Use external braking resistor and forced air cooling (not settable)
No braking resistors are used, and all are absorbed by capacitance
✎Note: VD2-010SA1G and VD2F-010SA1P drives has no built-in braking resistor by default, so the default
value of P00-09 is 3 (No braking resistors are used, and all are absorbed by capacitance).
External braking
resistor value
Used to set the power of external braking resistor of servo drive.
When the maximum braking energy calculated value is greater than the maximum braking energy absorbed by
capacitor, and the braking power calculated value is greater than the built-in braking resistor power, use
external braking resistors are required.
If the value of P00-10 is too large, Er.25 (too large braking resistor value) or Er.22 (main power supply is over
voltage) will occur.
When using an external braking resistor, the short wiring between C and D must be disconnected, and the
external braking resistor should wiring between P+ and D.
Please refer to 2.1.2 The composition of the servo drives.
External braking
resistor power
Used to set resistor value of external braking resistor of servo drive. The power of external braking resistor
P00-11 can not less than the braking resistance power calculation value.
Position pulse
type selection
In position control mode, when position instruction source is pulse instruction (P01-06=0) , input pulse pattern.
Direction + pulse(positive logic)
Please refer to Table 6-15 in
6.2.1 Position instruction
input setting in full version.
AB phase orthogonal pulse (4 times frequency)
Direction + pulse (negative logic)
AB phase orthogonal pulse (4 times frequency negative logic)
 Loading...
Loading...