Wecon VD2 SA Series Servo Drives Manual (Lite V1.1)
WECON technology Co., Ltd
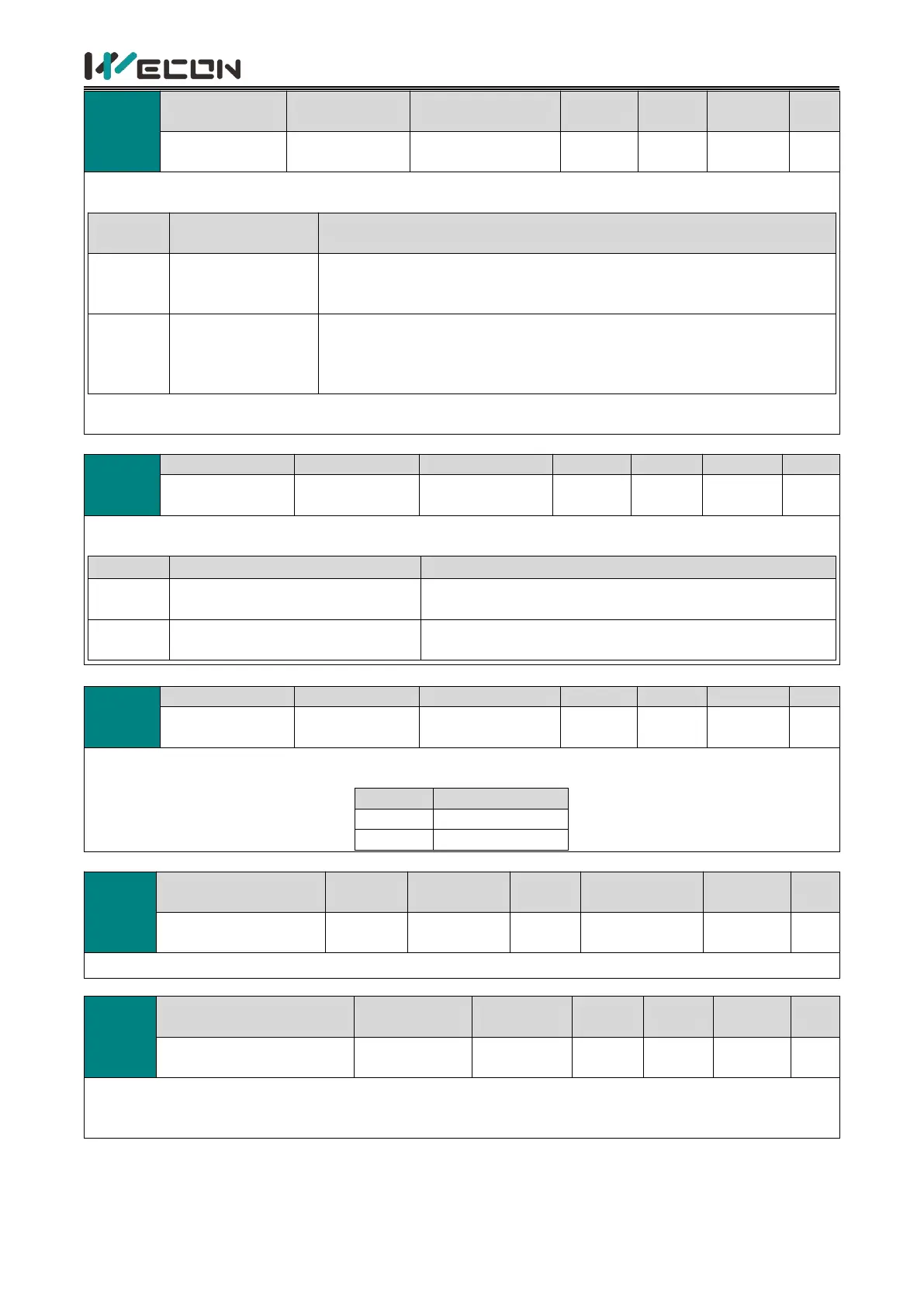
The starting segment number used for the servo drive will run when it resumes after pausing in multi-segment.
“Pause” indicates that internal multi-segment position enable signal changes from valid to invalid.
Run the remaining
positions
If P07-03 (end segment number) =16, servo would stop running in the 2nd
segment. After restoring the "Internal Multi-Segment Enable Signal", servo
would run from the 3rd segment.
Run again from the
starting position
If P07-02 (start segment number) =1, and P07-03 (end segment number)
=16, servo would stop running in the 2nd segment. After restoring the
"Internal Multi-Segment Enable Signal", servo would run from the set value
of P07-02
Once paused during multi-segment position operation, the servo drive will abandon the unfinished position
instructions in this segment and shutdown. Please refer to full version manual Margin handling method.
Displacement
instruction type
Set the displacement instruction type of multi-segment position function. “Displacement instruction” is the
sum of the displacement instructions over a period of time.
Relative position instruction
Relative displacement is the increment of the position of
the target relative to the current position of motor.
Absolute position instruction
Absolute displacement is the increment of the position of
the target relative to the origin of motor
Set the waiting unit of multi-segment position function. “waiting time” is the interval between the end of this
instruction and the start of the next instruction.
The 1st segment
displacement
Set the 1st segment position displacement
Maximum speed of the 1st
segment displacement
Set the maximum speed of the 1st position displacement. Maximum running speed refers to the speed the
motor that is not in the process of acceleration and deceleration. If P07-09 (1st position displacement) is set too
small, the actual speed of motor would be less than P07-10.
 Loading...
Loading...