上海维宏电子科技股份有限公司
Weihong Electronic Technology Co., Ltd.
- 120 - Specialized, Concentrated, Focused
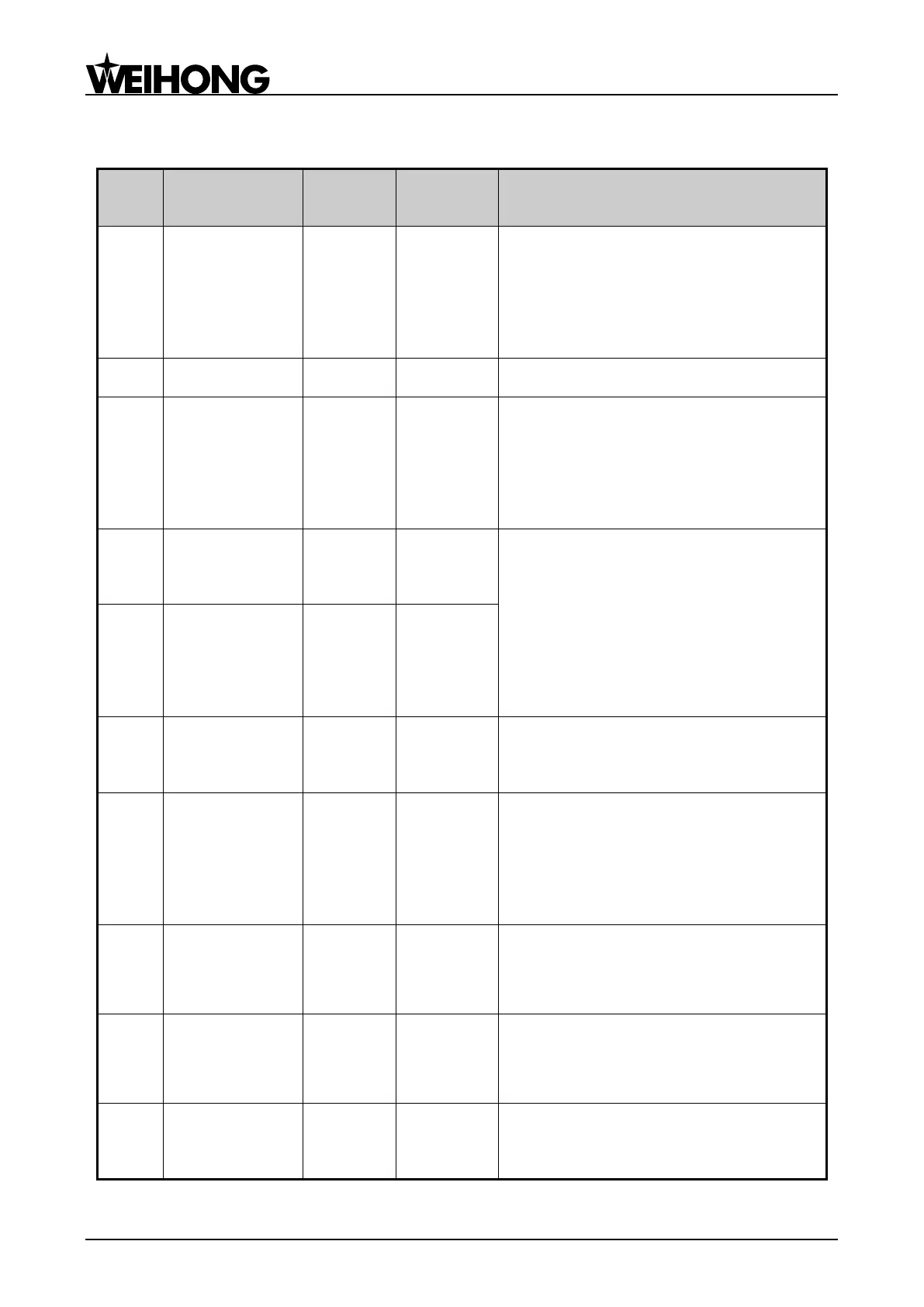
6.1.10 Parameter Setting of DELTA ASDA-A2 Servo Driver
Monitor if the number of sent and received
pulse is correct by setting this parameter. In
Weihong control system, the correct
quantity of pulse sent by control card is
detected by pulse inspection in order to
determine whether there is electrical
interference.
External pulse
train input type
X=2: pulse + direction;
Z=0: positive logic
Z=0: during control mode switching, DIO is
maintaining the set value. Since switching
control mode is not used, Z=0;
Y=0: positive rotation (CCW) (from the view
of load);
Y=1: negative rotation (CCW)
X1X0=00: position control mode
Electronic Gear
Ratio
( Numerator)
(N1)
N1/M= mechanical deceleration ratio × 4 ×
encoder pulses × pulse equivalent / pitch.
Representative value: encoder
pulses=2500, pitch =5mm, pulse
equivalent=0.001, deceleration ratio = 1,
calculation as below:
N1 / M = 2500×4×0.001/5 = 2/1, N1=2,
M=1;
When the multi-electronic gear ratio is not
used, P2-60 ~P2-62 are not required.
Electronic Gear
Ratio
(Denominator)
(M)
Digital Input Pin
1 (DI1)
X1X0=01: digital input (DI1 = SON)
corresponds to 9th pin of CN1.
X2=1: set DI1 input as NO (normally open)
a-contact point.
Function setting
for digital input
pin DI6
Default factory setting of DI6 and DI7 is NC
(normally closed) limit signal input; driver
can‘t run without being connected to pin 32
and pin 31 of CN1.
X2=1: set DI6 and DI7 input as NO
a-contact points.
X1X0=00, limit input of driver is not used.
Function setting
for digital input
pin DI7
Function setting
for digital input
pin DI8
External EMG stop input is not used.
Function setting
for digital output
pin DO4
DO4 corresponds to pin 1 & pin 26, used
as clamping-position brake signal of Z-axis;
X2=1: set DO4 output as NO (normally
open) a-contact point; X2=0: set DO4
 Loading...
Loading...



