DS3 series servo manual
28
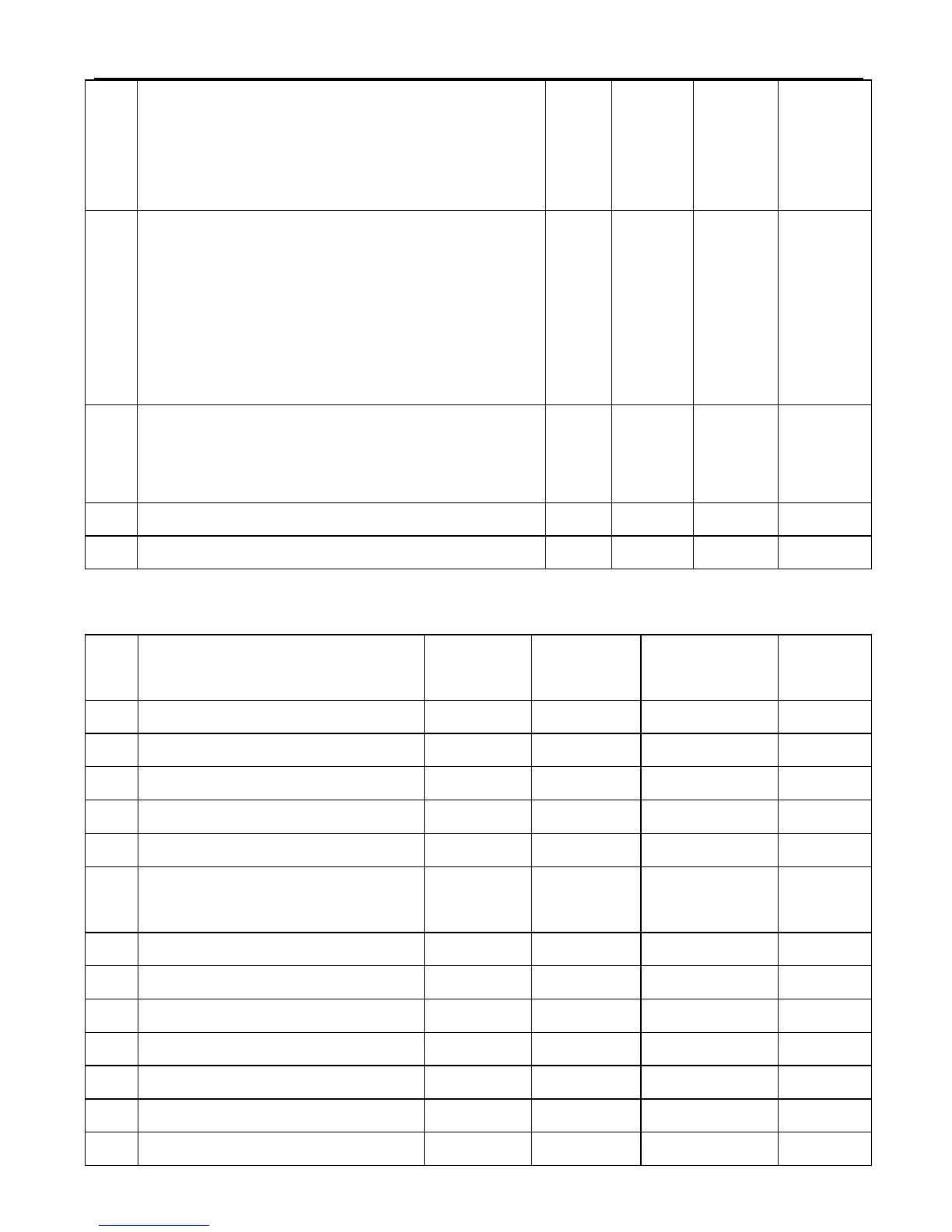
torque.
3: deceleration stop. After stop, change to
inertial motion state. Torque setting: P4-06
urgent stop torque.
07 T-REF distribution
0: no
1: make T-REF as external torque limit input
2: un-defined
3: P-CL, N-CL is ON, make T-REF as external
torque limit input.
- 0 0~3 ○
08 V-REF distribution
0: no
1: make V-REF as external speed limit input.
- 0 0, 1 ○
09 Reserved
10 Reserved
2. Control parameter P1 (address: 0100~01FF)
P1- Function Unit Default
value
Setting range Effective
time
00 Speed-loop gain 1Hz 100 1~5000
√
01 Speed-loop integral time 0.1ms 400 1~5000
√
02 Position-loop gain 1/s 30 1~2000
√
03 Rotation inertia ratio % 0 0~20000 √
04 Second speed-loop gain 1Hz 150 1~5000
√
05 Second speed-loop integral
time
0.1ms 100 1~5000
√
06 Second position-loop gain 1/s 80 1~2000
√
07 Reserved
08 Reserved
09 Position-loop feed-forward gain 1% 0 0~100
√
10 Feed-forward filter time 0.01ms 0 0~65535
√
11 Reserved
12 Reserved

 Loading...
Loading...

