Parameter Details
12
12.2 A: Initialization Parameters
YASKAWA SIEPC71061753C GA500 Technical Manual 497
Table 12.22 Adjustment of Drive Control (Open Loop Vector Control Method)
Adjustment description Parameter Number Possible Solutions Default Recommended Setting
• Torque, increase speed
response
• Prevent hunting and
oscillation at middle-range
speeds (10 Hz to 40 Hz)
n2-01 [Automatic Freq Regulator
Gain]
• If torque and speed response
are slow, decrease the setting
value.
• If there is hunting or
oscillation, increase the setting
value.
1.00 0.50 - 2.00
• Torque, increase speed
response
• Prevent hunting and
oscillation
C4-02 [Torque Compensation
Delay Time]
*1
• If torque and speed response
are slow, decrease the setting
value.
• If there is hunting or
oscillation, increase the setting
value.
20 ms 20 ms to 100 ms
• Increase speed response
• Increase speed stability
C3-02 [Slip Compensation Delay
Time]
• When speed response is slow,
decrease the setting value.
• If speed is not stable, increase
the setting value.
200 ms 100 ms to 500 ms
• Improve speed accuracy C3-01 [Slip Compensation Gain]
• If speed is too slow, increase
the setting value.
• If speed is too fast, decrease
the setting value.
1.0 0.5 - 1.5
• Increasing motor excitation
sound
• Prevent hunting and
oscillation at low-range speeds
(10 Hz to or lower)
C6-02 [Carrier Frequency
Selection]
• If there is a loud motor
excitation sound, increase the
setting value.
• If there is hunting or
oscillation at low speeds,
decrease the setting value.
*2
1 - F
• Increase torque and speed
response at low speeds
• Prevent shock during start up
E1-08 [Mid Point AVoltage]
• If the torque and speed
response are slow, increase the
setting value.
• If there is a large shock during
start up, decrease the setting
value.
11.0 V
*3
12.0 V to 13.0 V
*3
E1-10 [Minimum Output Voltage] 2.0 V
*3
2.0 V to 3.0 V
*3
*1 If the value for C4-02 [Torque Compensation Delay Time] is high, the current can increase during start up. Adjust and check the
current during start up.
*2 The default setting changes when the settings for C6-01 [Normal / Heavy Duty Selection] and o2-04 [Drive Model (KVA) Selection]
change.
*3 This is the setting for 200 V class drives. Multiply the voltage by 2 for 400 V class drives.
Elevator Start/Stop and Accel/Decel Time Shock Reduction
Shock when you start and stop the elevator and when you accelerate and decelerate is an issue for passenger
elevator applications. If shock has an effect on the quality of the ride, adjust these parameters:
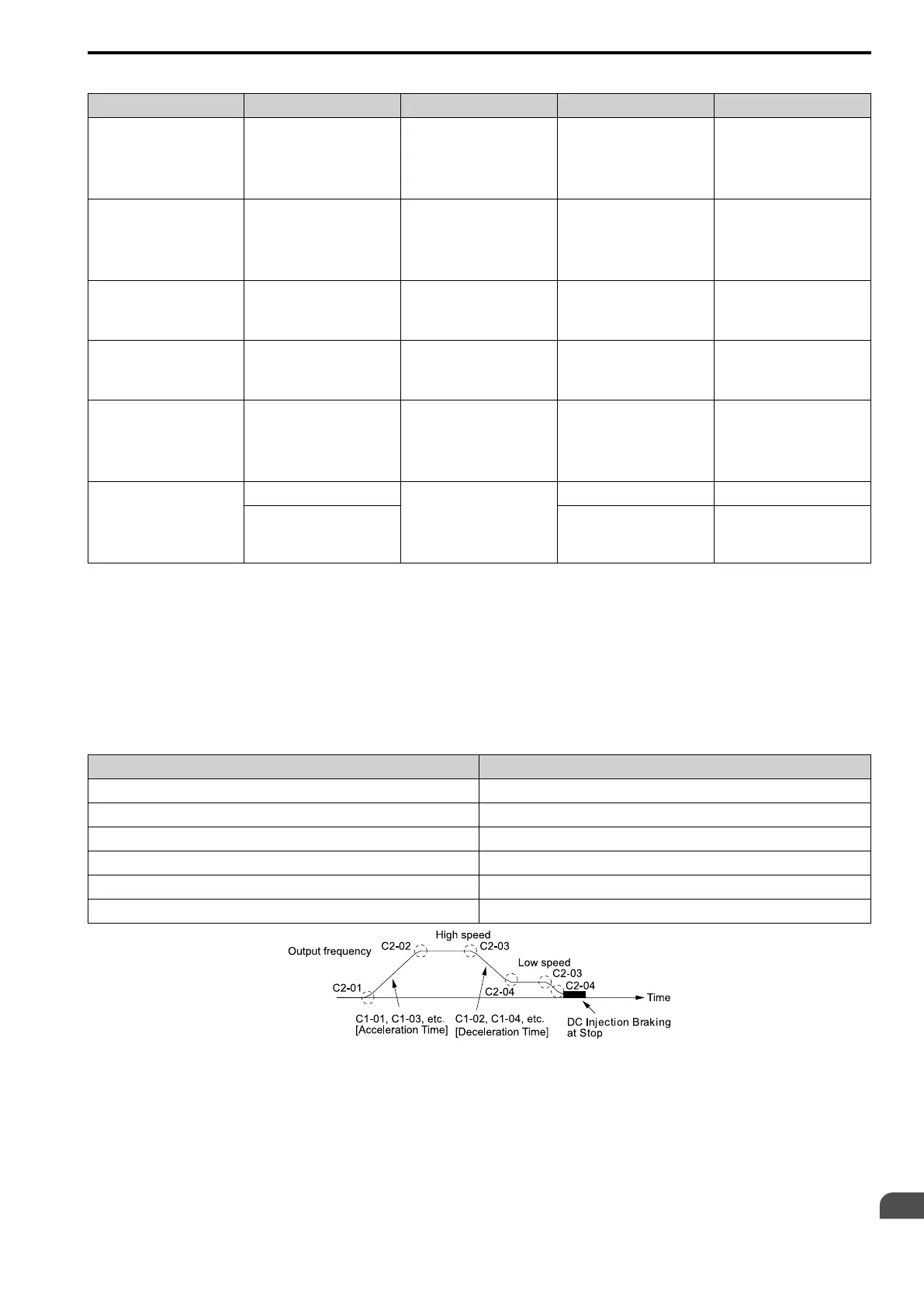
S-Curve Characteristics, Accel & Decel Time
Adjustment Parameter Name
C1-01, C1-03, C1-05, C1-07 Acceleration Time 1 to 4
C1-02, C1-04, C1-06, C1-08 Deceleration Time 1 to 4
C2-01 S-Curve Time @ Start of Accel
C2-02 S-Curve Time @ End of Accel
C2-03 S-Curve Time @ Start of Decel
C2-04 S-Curve Time @ End of Decel
Figure 12.4 S-curve Characteristics, Accel & Decel Time

 Loading...
Loading...







