3.2 Operating Procedures for Utility Functions
3.2.4 Jog Program (Fn004)
3-15
3.2.4
Jog Program (Fn004)
You can use this utility function to perform continuous operation with a
preset operation pattern, travel distance, movement speed, accelera-
tion/deceleration time, waiting time, and number of movements.
Preparations
Always check the following before you execute program jogging.
• The parameters must not be write-prohibited (Fn010 must be set to
0000).
• The servo must be OFF.
• The servo must be in ready status.
• The range of machine motion and the safe movement speed of your
machine must be considered when you set the travel distance and
movement speed.
• There must be no overtravel.
Operation
The program for jogging is set in advance with the following parameters.
Consider the range of machine motion and the safe movement speed of
your machine, and set the travel distance and movement speed cor-
rectly.
* Parameter Pn585 is used for a Linear Servomotor.
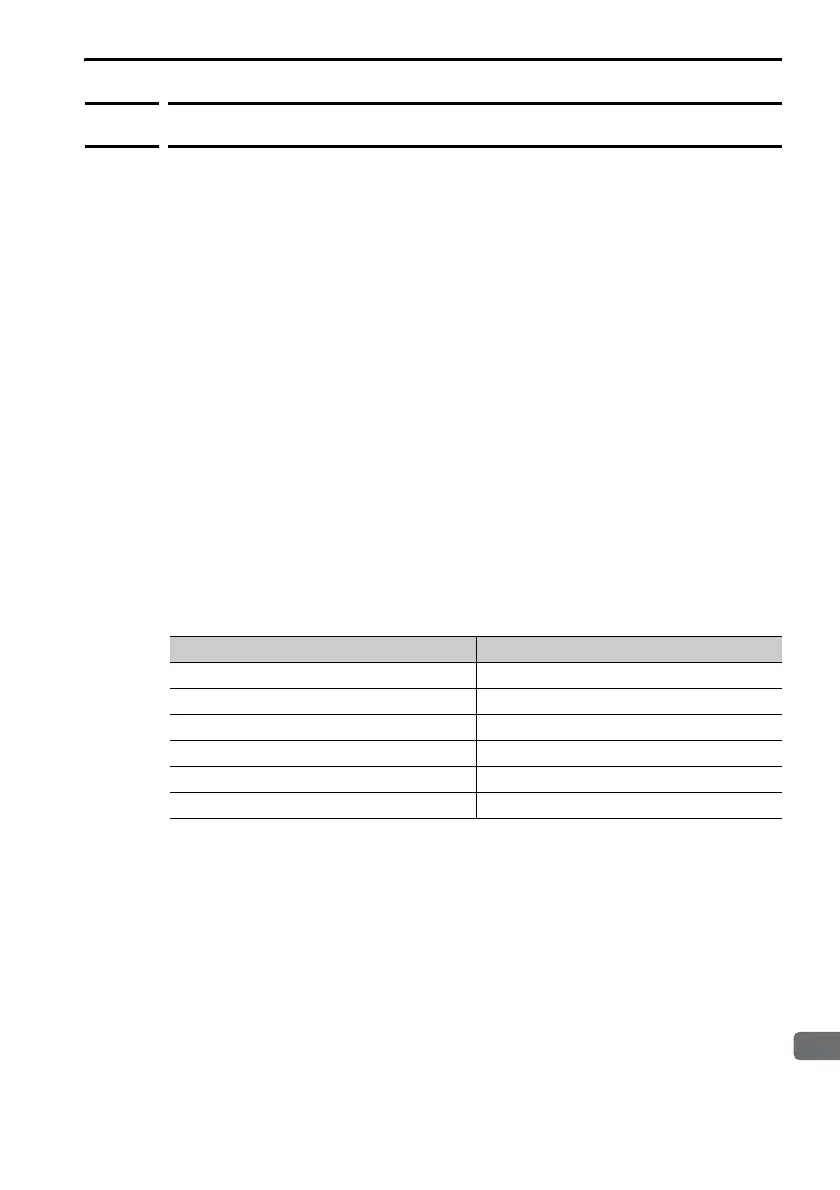
Program Jogging Element Parameter
Operation Pattern Pn530=n.X
Travel Distance Pn531
Movement Speed Pn533*
Acceleration/Deceleration Time Pn534
Waiting Time Pn535
Number of Movements Pn536

 Loading...
Loading...







