Parameter Details
5
5.7 H: Terminal Functions
YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference 269
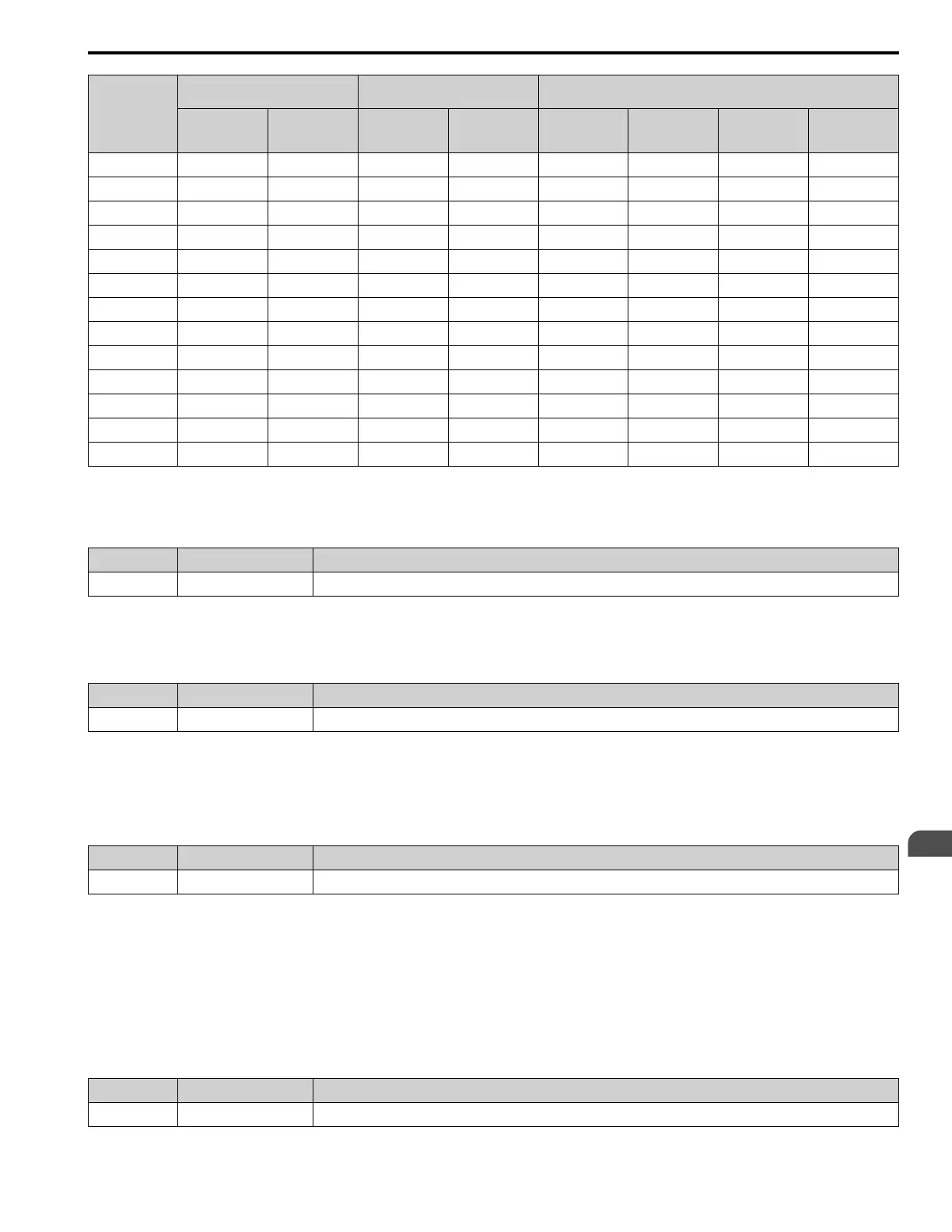
Setting
Signal Input Method from
Peripheral Devices
*1
External Fault Detection Method
*2
Stopping Method
N.O. N.C.
Always
Detected
Detected during
RUN Only
Ramp to Stop
(Fault)
Coast to Stop
(Fault)
Fast Stop
(Fault)
Continuous
Operation
(Alarm Only)
23 - x - x x - - -
24 x - x - - x - -
25 - x x - - x - -
26 x - - x - x - -
27 - x - x - x - -
28 x - x - - - x -
29 - x x - - - x -
2A x - - x - - x -
2B - x - x - - x -
2C x - x - - - - x
2D - x x - - - - x
2E x - - x - - - x
2F - x - x - - - x
*1 Set the terminal to N.O. (detects external fault when switched ON) or N.C. (detects external fault when switched OFF).
*2 Set the drive to always detect each fault or to detect only during run.
■ 30: PID Integrator Reset
Setting Value Function Description
30 PID Integrator Reset Sets the command to reset and hold the PID control integral to 0 when the terminal is ON.
Note:
Refer to “PID control block diagram” for more information.
■ 31: PID Integrator Hold
Setting Value Function Description
31 PID Integrator Hold Sets the command to hold the integral value of the PID control while the terminal is activated.
When you turn off the input terminal, PID control restarts the integral.
Note:
Refer to “PID control block diagram” for more information.
■ 34: PID Soft Starter Disable
Setting Value Function Description
34 PID Soft Starter Disable Sets the PID soft starter function.
ON : Disabled
Disables b5-17 [PID Accel/Decel Time].
OFF : Enabled
Enables b5-17 [PID Accel/Decel Time].
Note:
Refer to “PID control block diagram” for more information.
■ 35: PID Input (Error) Invert
Setting Value Function Description
35 PID Input (Error) Invert Sets the command to turn the terminal ON and OFF to switch the PID input level (polarity).

 Loading...
Loading...









