5.7 H: Terminal Functions
286 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference
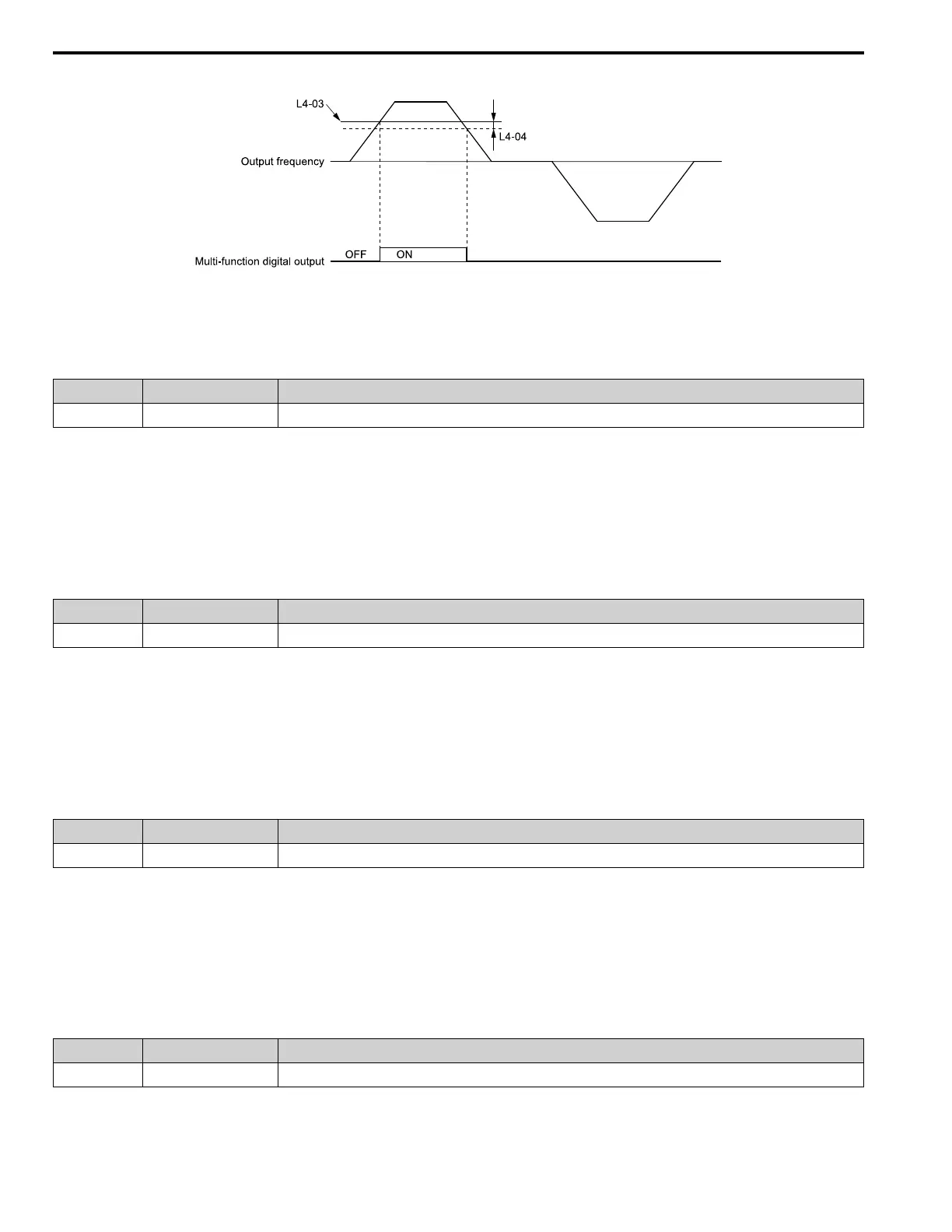
OFF : The output frequency < “L4-03 - L4-04”, or the output frequency ≤ L4-03.
L4-03: Speed Agree Detection Level(+/-) L4-04: Speed Agree Detection Width(+/-)
Figure 5.55 Example of Frequency Detection 4 (Value of L4-03 is Positive)
■ 17: Torque Detection 1 (N.C.)
Setting Value Function Description
17 Torque Detection 1 (N.C.) The terminal deactivates when the drive detects overtorque or undertorque.
Use the L6 [Torque Detection] parameters to set torque detection.
OFF : The output current/torque > L6-02 [Torque Detection Level 1], or the output current/torque <
L6-02 for longer than the time set in L6-03 [Torque Detection Time 1].
Note:
• When L6-01 ≥ 5, the drive will detect when the output current/torque is less than L6-02 for longer than L6-03.
• Refer to L6: Torque Detection on page 336 for more information.
■ 18: Torque Detection 2 (N.O.)
Setting Value Function Description
18 Torque Detection 2 (N.O.) The terminal activates when the drive detects overtorque or undertorque.
Use the L6 [Torque Detection] parameters to set torque detection.
ON : The output current/torque > L6-05 [Torque Detection Level 2], or the output current/torque < L6-
05 for longer than the time set in L6-06 [Torque Detection Time 2].
Note:
• When L6-04 ≥ 5, the drive will detect when the output current/torque is less than L6-05 for longer than L6-06.
• Refer to L6: Torque Detection on page 336 for more information.
■ 19: Torque Detection 2 (N.C.)
Setting Value Function Description
19 Torque Detection 2 (N.C.) The terminal deactivates when the drive detects overtorque or undertorque.
Use the L6 [Torque Detection] parameters to set torque detection.
OFF : The output current/torque > L6-05 [Torque Detection Level 2], or the output current/torque <
L6-05 for longer than the time set in L6-06 [Torque Detection Time 2].
Note:
• When L6-04 ≥ 5, the drive will detect when the output current/torque is less than L6-05 for longer than L6-06.
• Refer to L6: Torque Detection on page 336 for more information.
■ 1A: During Reverse
Setting Value Function Description
1A During Reverse The terminal activates when the motor operates in the reverse direction.
ON : The motor is operating in the reverse direction.
OFF : The motor is operating in the forward direction or the motor stopped.
 Loading...
Loading...










