6-20
IM80B80T10E 21th Edition : Jul.1,2007-00
< 6.INSTALLATION >
�Checksum
The characters in the area from next "$" to immediately "*" are EXCLUSIVEORed (on a bit-by-bit
basis), and then the result is divided into two groups: the upper 4 bit and the lower 4 bit. These two
groups (SUM1 and SUM2) are further converted into ASCII, and used as checksum data.
Format of the data section
1. NMEA0183 Version 2.0 format
EML input (dual-axis system)
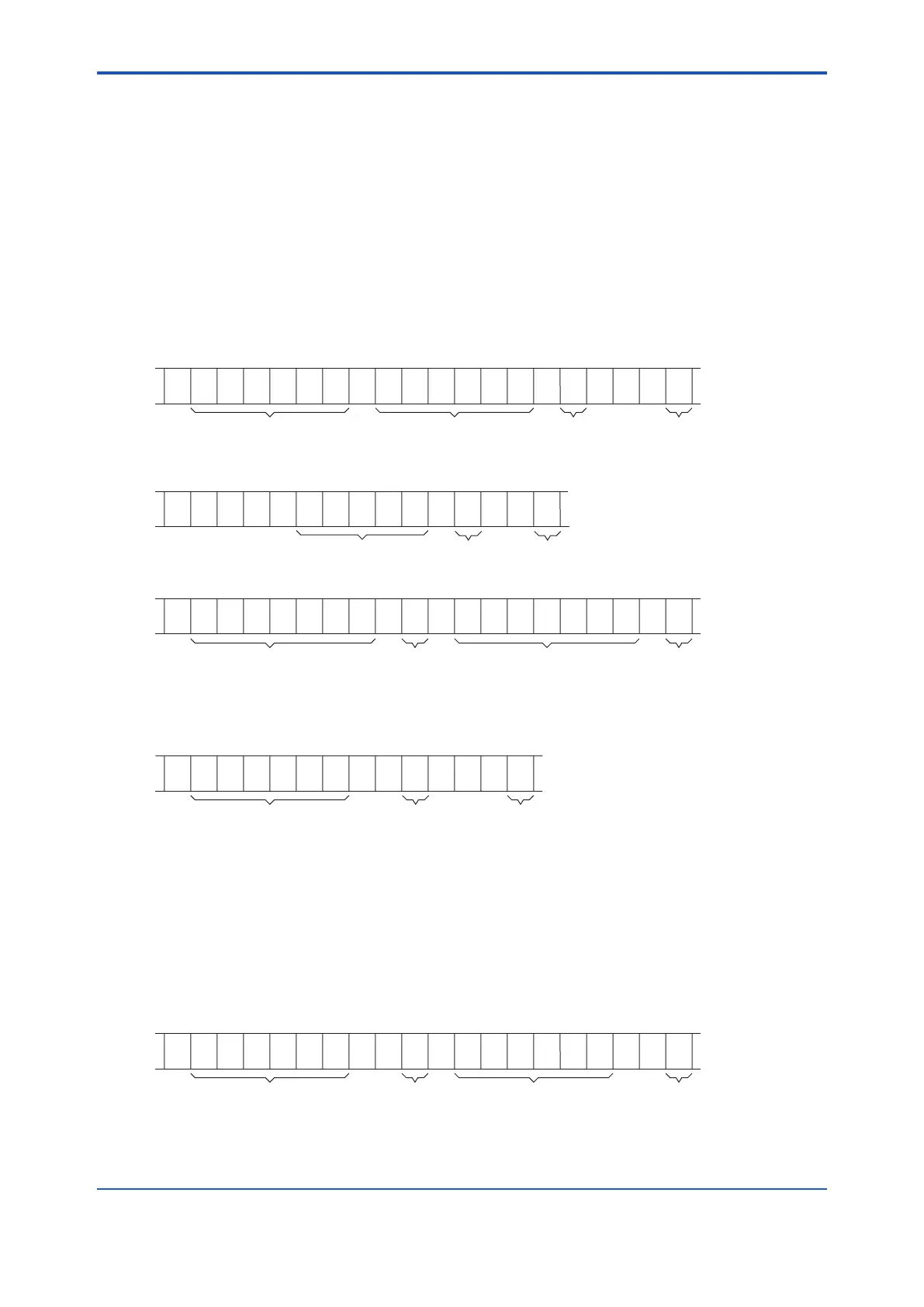
�VBWdata
, 0/- 10
1
10
0
. 10
-1
10
-2
, 0/- 10
1
10
0
. 10
-1
10
-2
, A/V , , , V
Longitudinal speed(kt)
Transverse speed(kt)
A:Valid
V:Invalid
V:Invalid
�VHWdata(Only'kt'valuedataisavailable)
, , , , , 10
1
10
0
. 10
-1
10
-2
, N , , K
N:kt K:km/h
Longitudinal speed(kt)
�VLWdata
, 10
3
10
2
10
1
10
0
. 10
-1
10
-2
, N , 10
3
10
2
10
1
10
0
. 10
-1
10
-2
, N
Total distance traveled(nm)
Trip distance(nm)
N:nm N:nm
EML input (single-axis system)
�VBWdata
, 0/- 10
1
10
0
. 10
-1
10
-2
, , A/V , , , V
Longitudinal speed(kt)
A:Valid
V:Invalid
V:Invalid
�VHWdata
The same EML input (dual-axix system)
�VLWdata
The same EML input (dual-axis system)
GPS input
�VBWdata
, 0/- 10
1
10
0
. 10
-1
10
-2
, , A/V , 0/- 10
1
10
0
. 10
-1
10
-2
, , A/V
Longitudinal water speed(kt)
Longitudinal ground speed(kt)
A:Valid
V:Invalid
A:Valid
V:Invalid
When set the Dip switch 8-4 to ‘ON’ , Longitudinal ground speed data is set on this eld.

 Loading...
Loading...