3 Click Tool Position Supervision in the Modify ribbon tab and set the
properties.
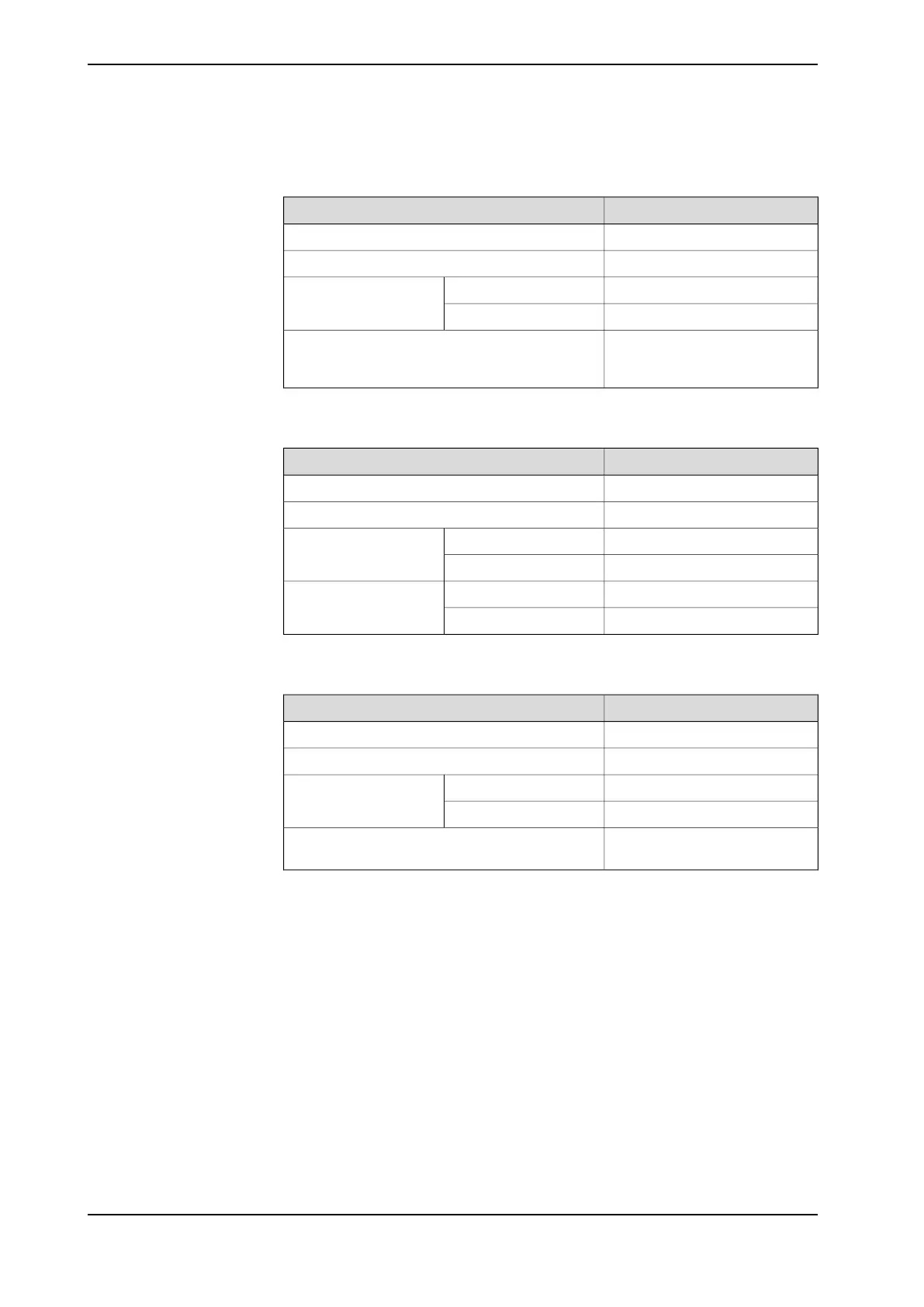
ValueParameter
PermanentlyActiveActivation
No signalFunction active status
Category1StopStop categoryViolation action
No signalSignal
Checked the Include upper arm
geometry and Allow inside
check boxes.
Settings
4 In the Visual SafeMove browser, right-click Tool Speed Supervisions and
choose Create Global Tool Speed Supervision.
ValueParameter
ISH_Supervise_TSPActivation
ISH_TSP_ActiveFunction active status
Category1StopStop categoryViolation action
ISH_TSP_ViolSignal
250.000Max speed (mm/s)Settings
Leave blankMin speed (mm/s)
5 In the Visual SafeMove browser, right-click Stand Still Supervisions and
choose Create Global Stand Still Supervision.
ValueParameter
ISH_Supervise_SSTActivation
ISH_SST_ActiveFunction active status
Category0StopStop categoryViolation action
ISH_SST_ViolSignal
Enabled for all joints and remain
default tolerance values.
Tolerances
Uploading the settings to the controller
1 In the Visual SafeMove ribbon tab, click Controller in the Configuration
group.
2 Click Write to controller.
The configurations are uploaded to the controller after the controller restarts.
128 Product manual - CRB 1300
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.4.2 Configuration of SafeMove using Visual SafeMove in RobotStudio
Continued