3.3.7 Installation of lead-through device
Introduction
The lead-through functionality is available for the CRB 1300 by mounting a
lead-through device on axis 6. With the lead-though functionality enabled, you can
hold the handler of the lead-through device and move the robot arm manually to
the desired position, as an alternative to jogging.
To use lead-through, make sure the system is running in manual mode; otherwise,
the functionality cannot be enabled. If running the system in auto mode, always
remove the lead-through device from the robot first to prevent any unexpected
damages.
CAUTION
Be careful not to stretch or squeeze the device cabling when moving the robot
with the lead-through device, especially to extreme positions. Otherwise, it will
cause cabling damages.
Location of lead-through device
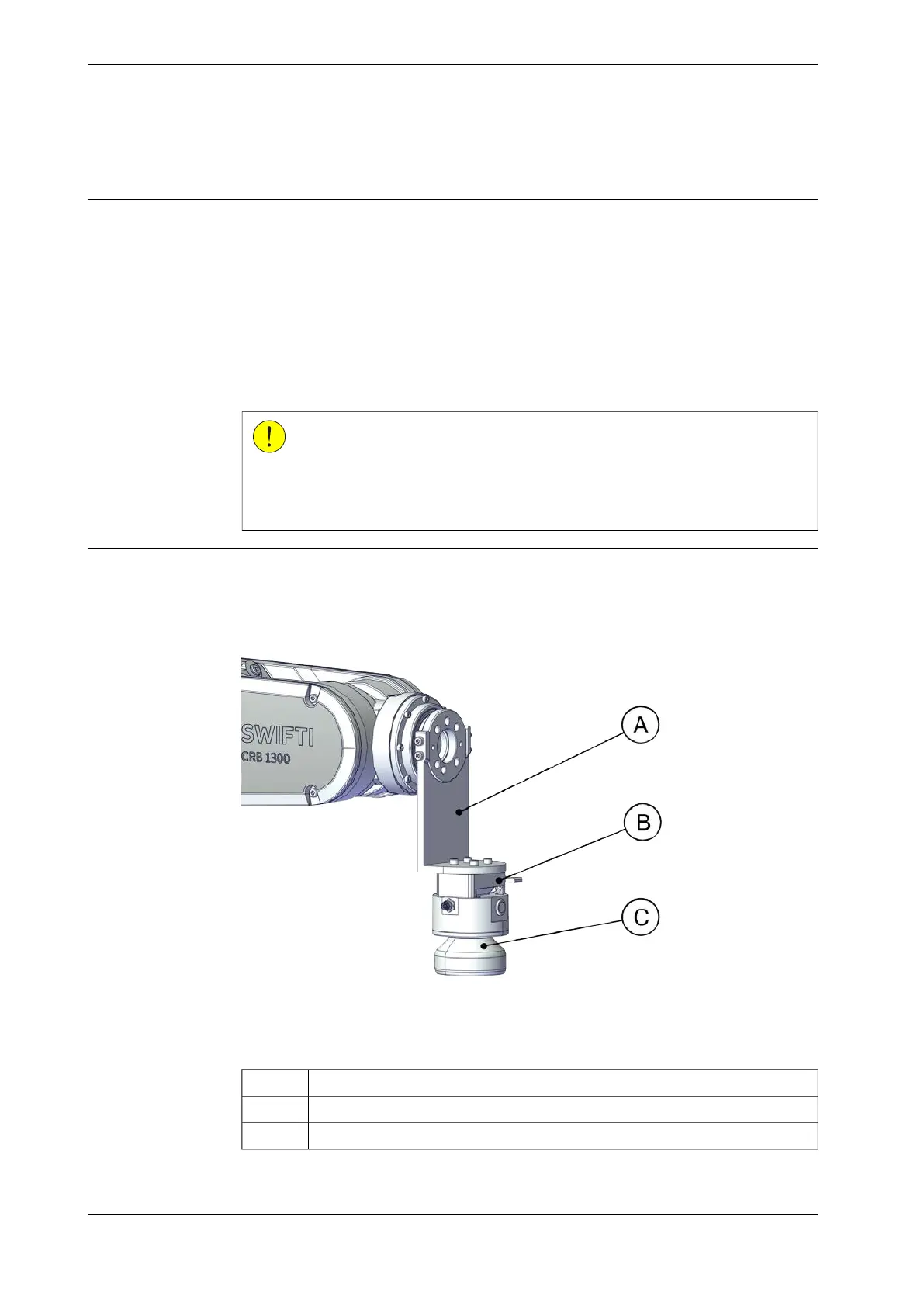
The lead-though device is located as shown in the figure.
xx2200000952
AdapterA
Lead-through device baseB
Lead-through deviceC
Continues on next page
82 Product manual - CRB 1300
3HAC083111-001 Revision: B
© Copyright 2022-2023 ABB. All rights reserved.
3 Installation and commissioning
3.3.7 Installation of lead-through device