Note: The failure of deceleration initiated by SS1-t cannot be prevented by FSPS-21.
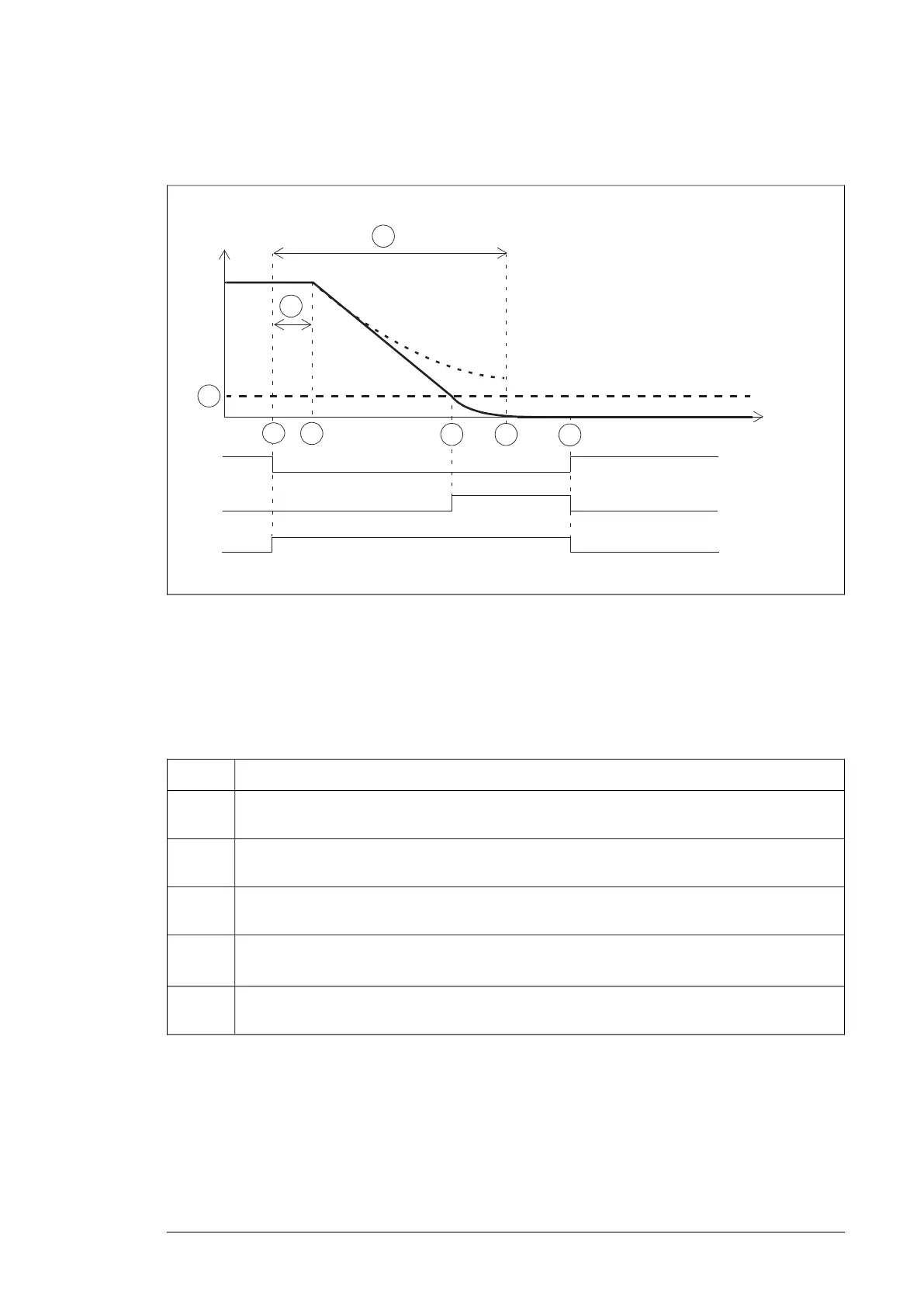
Drive STO state
& indication
SS1 request
Motor speed
Time
SS1 state &
indication
1
2
3
A
B
C
3b
4
SS1-t delay for STO: Time after which the module activates the drive STO function regardless of
the motor speed. The value is received from the safety PLC in each SS1-t activation request, see
section ABB_PS3 profile F-Output user data (page 116).
A
Zero speed (drive parameter 21.06): Speed limit for activating the drive STO function.B
Safety function response time (depends on system configuration). For more information see chapter
Technical data.
C
DescriptionStep
The SS1-t request is received from the safety PLC. The module starts a counter for time A. The
SS1-t indication (Off3) in the drive and safety PLC goes on.
1
After time C has elapsed, the drive starts to ramp down the motor speed. Drive parameters define
the deceleration ramp (emergency stop ramp).
2
The motor speed reaches the user-defined zero speed limit (B) and the module activates the drive
STO function.
3
If the drive has not ramped down fast enough when time A has elapsed, the module activates the
drive STO function and generates a fault - see section Fault messages (page 179).
3b
The SS1-t request is removed from the safety PLC. The STO and SS1 functions are automatically
acknowledged and the indications go off.
4
■ Priorities of safety functions
STO function will always override SS1-t function, should they occur within the same time
frame.
Safety functions 29