MOTION CONTROL
SMD17E2 User Manual
ADVANCED MICRO CONTROLS INC.
28
A Simple Move
As shown in the figure below, a move from A (Current Position) to B (Target Position) consists of several
parts.
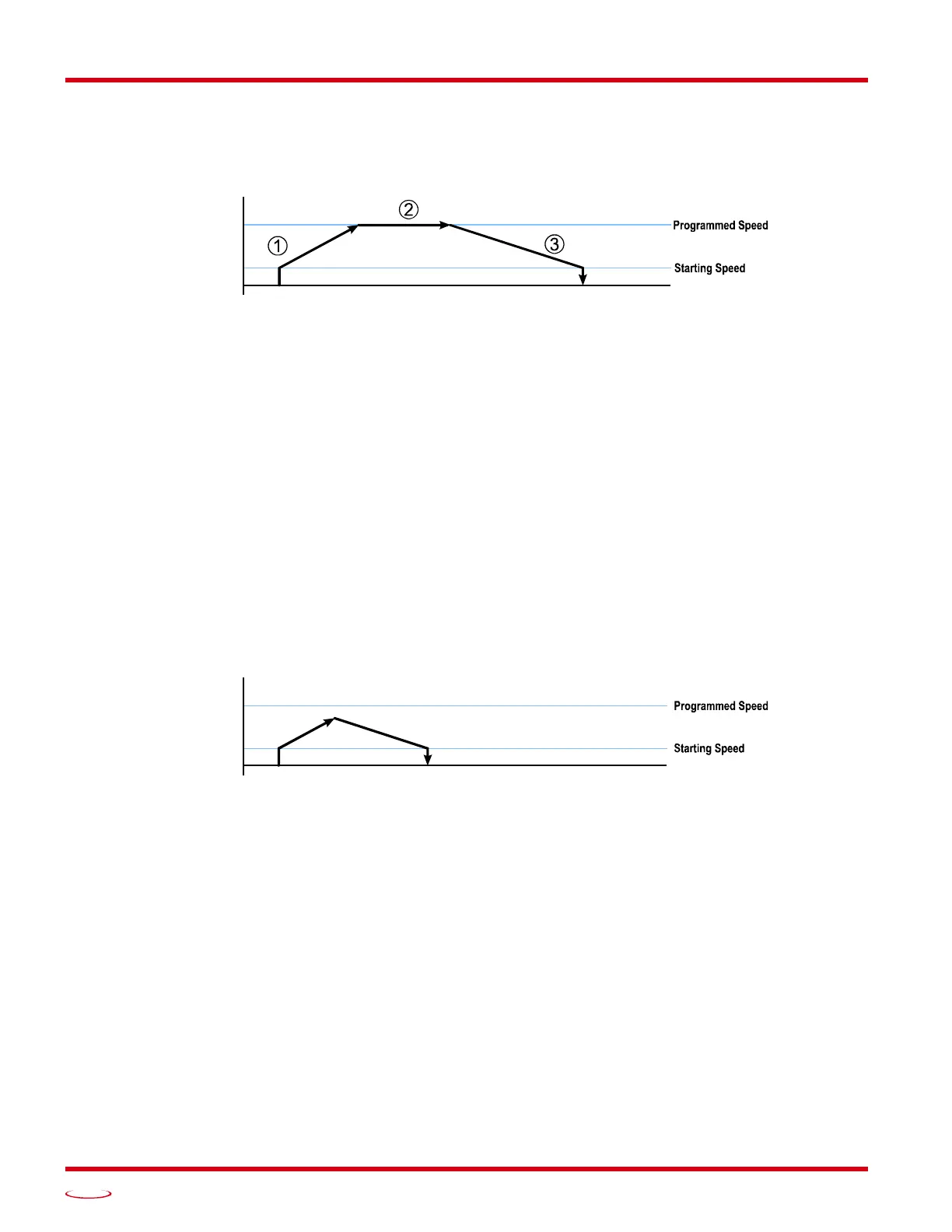
Figure R2.4 A Trapezoidal Profile
1) The move begins at point A, where the motor jumps from rest to the configured Starting Speed. The
motor then accelerates at the programmed Acceleration Value until the speed of the motor reaches the
Programmed Speed. Both the Acceleration Value and the Programmed Speed are programmed when
the move command is sent to the SMD17E2.
2) The motor continues to run at the Programmed Speed until it reaches the point where it must
decelerate before reaching point B.
3) The motor decelerates at the Deceleration Value, which is also programmed by the move command,
until the speed reaches the Starting Speed, which occurs at the Target Position (B). The motor stops at
this point. Note that the acceleration and deceleration values can be different in the move.
Figure R2.4 above shows a Trapezoidal Profile. A Trapezoidal Profile occurs when the Programmed Speed is
reached during the move. This occurs when the number of steps needed to accelerate and decelerate are less
than the total number of steps in the move.
Figure R2.5 below shows a Triangular Profile. A Triangular Profile occurs when the number of steps needed
to accelerate to the Programmed Speed and decelerate from the Programmed Speed are greater than the total
number of steps in the move. In this case, the profile will accelerate as far as it can before it has to decelerate
to reach the Starting Speed at the Target Position. The Programmed Speed is never reached.
Figure R2.5 A Triangular Profile
SPEED
AB
SPEED
POSITION
B