COMMAND MODE DATA FORMAT
SMD17E2 User Manual
ADVANCED MICRO CONTROLS INC.
72
Command Word 1 (continued)
Bit 5:
Save_to_Flash -
This bit can be used to save a programmed Assembled Move to flash memory or to
store the absolute encoder position offset to flash. (The absolute encoder position offset is generated
by the Encoder Preset command.)
When using this bit to save the programmed Assembled Move to flash memory, this bit must be
set when the Program_Assembled bit (Command Word 0, bit 11) makes a 1
0 transition at the
end of the programming cycle. The unit responds by flashing the Status LED when the writing is
complete. If the LED is flashing green, the write to flash memory was successful. If it flashes
red, then there was an error in writing the data. In either case, power must be cycled to the unit
before you can continue. This design decision is to protect the flash memory from constant write
commands. The flash memory has a minimum of 10,000 write cycles.
When using this bit to save the calculated absolute encoder offset value to flash memory, this bit
must be set when the Preset Encoder command is issued. (Bit 14 of Command Word 0 is set to
“1”, see page 69.) If the offset is stored without error, the unit will respond by setting the
Acknowledge bit. (Bit 13 of Status Word 1 Format, see page page 83.)
Bit 4:
Reverse_Blend_Direction –
When you command a Blend Move to run, this bit determines the direc-
tion of rotation. Set to “0” for a clockwise Blend Move, “1” for a counter-clockwise Blend Move.
Bits 3-2: Reserved – Must equal “0”.
Bit 1: Motor Current – If reset to “0”, the motor current will be the value specified when the SMD17E2
was configured. Set to “1” to program the motor current to the value in word 8 of the command
block. Motor current can set as a separate command or as part of a move command.
Bit 0: Reserved – Must equal “0”.
Command Blocks
The following section lists the output data format for the sixteen different commands.
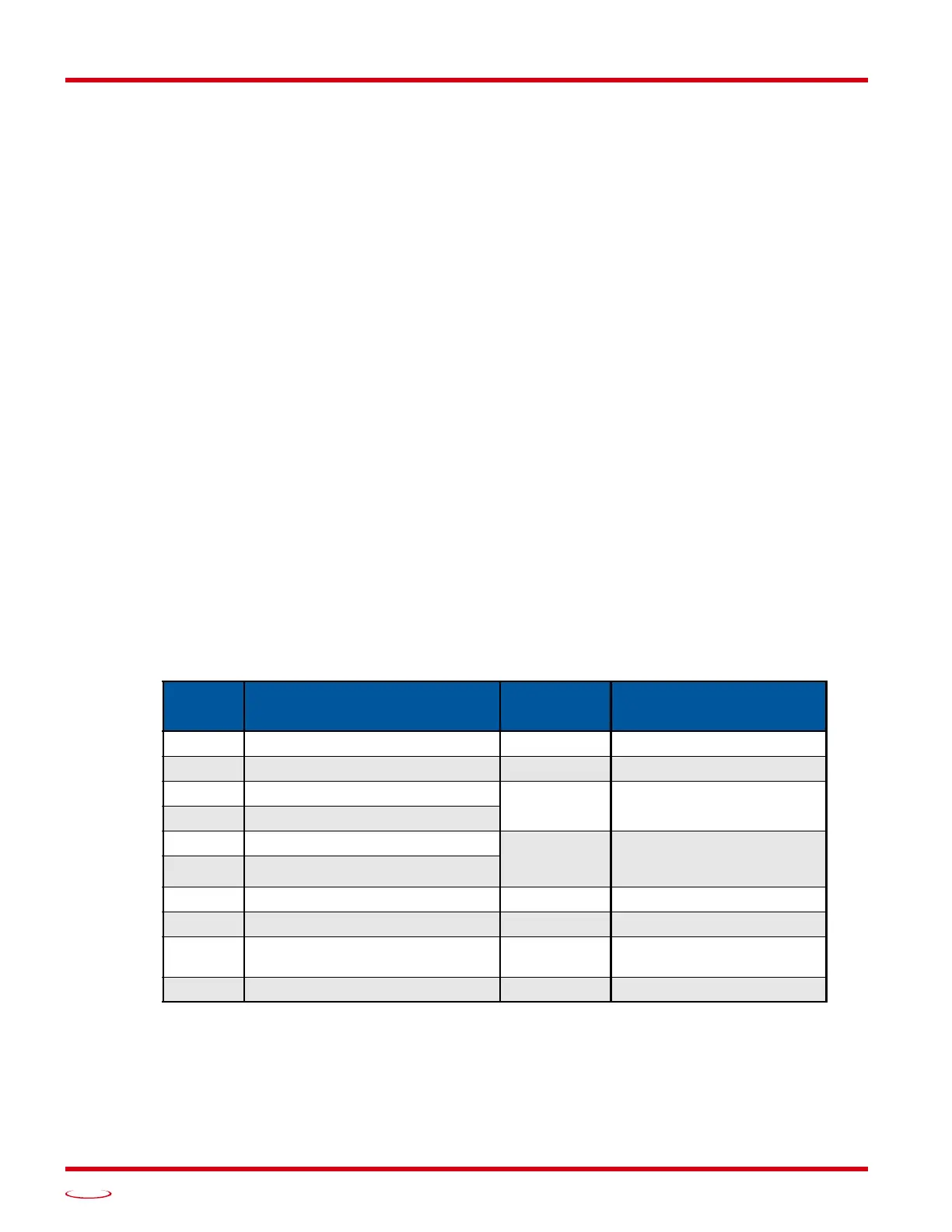
Absolute Move
Table R6.2 Absolute Move Command Block
PROFINET
Word
Function Units Range
0 Command Word 0 16#0001
1 Command Word 1 See pg. 71
2 Abs. Target Position: Upper Word
Steps
Combined value between
–8,388,608 and +8,388,607
3 Abs. Target Position: Lower Word
4 Programmed Speed: Upper Word
Steps/Second
Combined value between
the Configured Starting
Speed and 2,999,999
5 Programmed Speed: Lower Word
6 Acceleration Steps/sec/ms 1 to 5000
7 Deceleration Steps/sec/ms 1 to 5000
8 Motor Current 0.1 amps
1 to 20. Ignored if bit 1 of
Command Word 1 is not set.
9 Acceleration Jerk 0 to 5000