Publication 0160-5.18 - June 2003
B-20 DeviceNet Information
Class Code 0xB3 —
160 Parameter Table Object
(Continued)
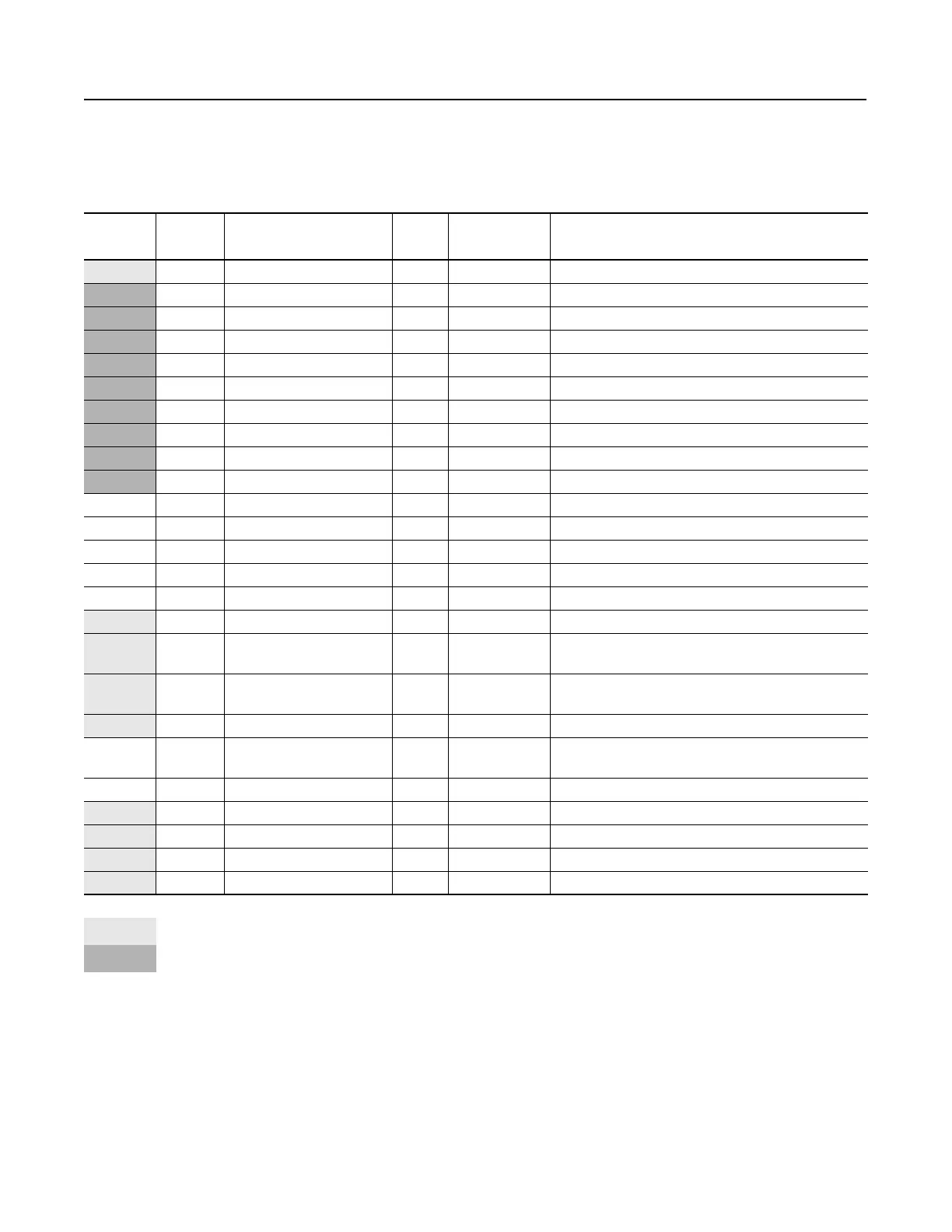
Attribute ID
Access
Rule
Parameter Name
Data
Type
Units Description
60 Get/Set [Zero Offset] INT Numeric Value Add or subtracts an offset to the analog input.
60 Get/Set [DN Preset Cmd] USINT Numeric Value Network preset command.
61 Get/Set [Preset Freq 0] UINT 0.1 Hz Sets command frequency when selected.
62 Get/Set [Preset Freq1] UINT 0.1 Hz Sets command frequency when selected.
63 Get/Set [Preset Freq 2] UINT 0.1 Hz Sets command frequency when selected.
64 Get/Set [Preset Freq 3] UINT 0.1 Hz Sets command frequency when selected.
65 Get/Set [Preset Freq 4] UINT 0.1 Hz Sets command frequency when selected.
66 Get/Set [Preset Freq 5] UINT 0.1 Hz Sets command frequency when selected.
67 Get/Set [Preset Freq 6] UINT 0.1 Hz Sets command frequency when selected.
68 Get/Set [Preset Freq 7] UINT 0.1 Hz Sets command frequency when selected.
69 Get/Set [Accel Time 2] UINT 0.1 Seconds Sets acceleration rate for presets 4 to 7.
70 Get/Set [Decel Time 2] UINT 0.1 Seconds Sets deceleration rate for presets 4 to 7.
71 Get/Set [IR Compensation] USINT 1% Adds a voltage to the output based on the torque current.
72 Get/Set [Slip Comp] USINT 0.1 Hz Compensates for the inherent slip of the motor.
73 Get/Set [Reverse Disable] BOOL Numeric Value Setting to 1 disables the reverse.
74 Get/Set [Analog Select] BOOL Numeric Value Selects between unipolar and bipolar analog input.
75 Get/Set [Analog Minimum] INT 0.1% Sets the percent of the analog input used to represent
P32 - [Minimum Freq].
76 Get/Set [Analog Maximum] INT 0.1% Sets the percent of the analog input used to represent
P33 - [Maximum Freq].
78 Get/Set [Compensation] BOOL Numeric Value Setting to 1 enables the compensation.
79 Get/Set [Current Trip] USINT 1% Percent above P43 - [Current Limit] at which the drive trips
immediately.
80 Get/Set [Stall Disable] USINT Numeric Value Time drive is in stall condition before causing a stall fault.
81 Get/Set [Proc Kp Gain] UINT Numeric Value Proportional gain used by the PI regulator.
82 Get/Set [Proc Ki Gain] UINT Numeric Value Integral gain used by the PI regulator.
83 Get/Set [Proc Reference] UINT Numeric Value Set point value to which PI control will regulate.
84 Get/Set [Proc Invert] USINT Numeric Value The PI control will ignore errors less than this value.
This parameter applies only to the Analog Signal Follower model.
This parameter applies only to the Preset Speed model.

 Loading...
Loading...





