Mentor ll User Guide 23
Issue Number: 12 www.controltechniques.com
7.3.4 Field weakening
In the example, the maximum armature voltage is 500V DC. If field
weakening is required, a typical practical setting for the back-EMF cross-
over point 06.07 wouldbe15to20voltsbelowthemaximumarmature
voltage.
For example, set 06.07 =480.
At the reduced voltage, the field would begin to weaken progressively
down to the value set by parameter 06.10. Since the field current
feedback setting 06.11 in this example is 204 - 2A range - the minimum
is a selected percentage of it. Suppose 90% is selected. Then :
The setting for minimum field current is :
06.10 =0.45 x 1000= 450
For correct operation, field weakening requires speed feedback.
(Armature voltage feedback would not be adequate to ensure control.)
Therefore, 03.13 would be set to 0 for AC or DC tach. feedback, and
speed scaling 03.16 would be set to 250, corresponding to 2500rpm
maximum permissible motor speed. Parameter 03.03 will then correctly
read out the actual motor rpm.
If an encoder (pulse tach.) were to be employed, parameter 03.12 would
be set to 1 and the encoder scaling 03.14 wouldneedtobeset
accordingly. The value of 03.14 is dependent on :
The maximum motor speed required, and
The number of encoder (pulse tach.) pulses per revolution.
7.3.5 Current loop self-tuning
The following procedure is optional, and for most general
applications is not required. However, if optimum dynamic
response is desirable, the current loop, which is the innermost
control loop, must be set up to enable the outer control loop (such
as the speed loop) to function correctly. The dynamics of the
current loop are principally a function of the electrical
characteristics of any particular motor.
The Mentor II has a built-in self-tuning procedure.
First,themotorrotormustbelockedorthefielddisconnectedtoallow
the Drive to inject armature current and determine the electrical
characteristics of the armature. The rotor must not be allowed to rotate
during the self-tuning procedure. (Normally, if the field is disconnected,
the rotor of a shunt wound motor will not move.)
Mentor II units from M25 through to M210 contain an internal field
regulator and do not require the field to be disconnected.
Self-Tuning Procedure
1. Power-up the Drive.
2. Set parameter 00 = 200 to satisfy security.
3. Set 05.09 =1
4. Enable the Drive connect terminal TB4-31 to 0V
5. Perform a Save parameter values procedure before disconnecting
the Drive. The parameters affected by the self-tuning procedure are
05.12 to 05.15.(For the save procedure, refer to section To Save the
Value(s) Written on page 25.
6. The Drive also has the facility to carry out a continuous autotune by
setting parameter 05.27 which will adjust the current loop gains to
keep the current loop performance optimised in the case of varying
load conditions.
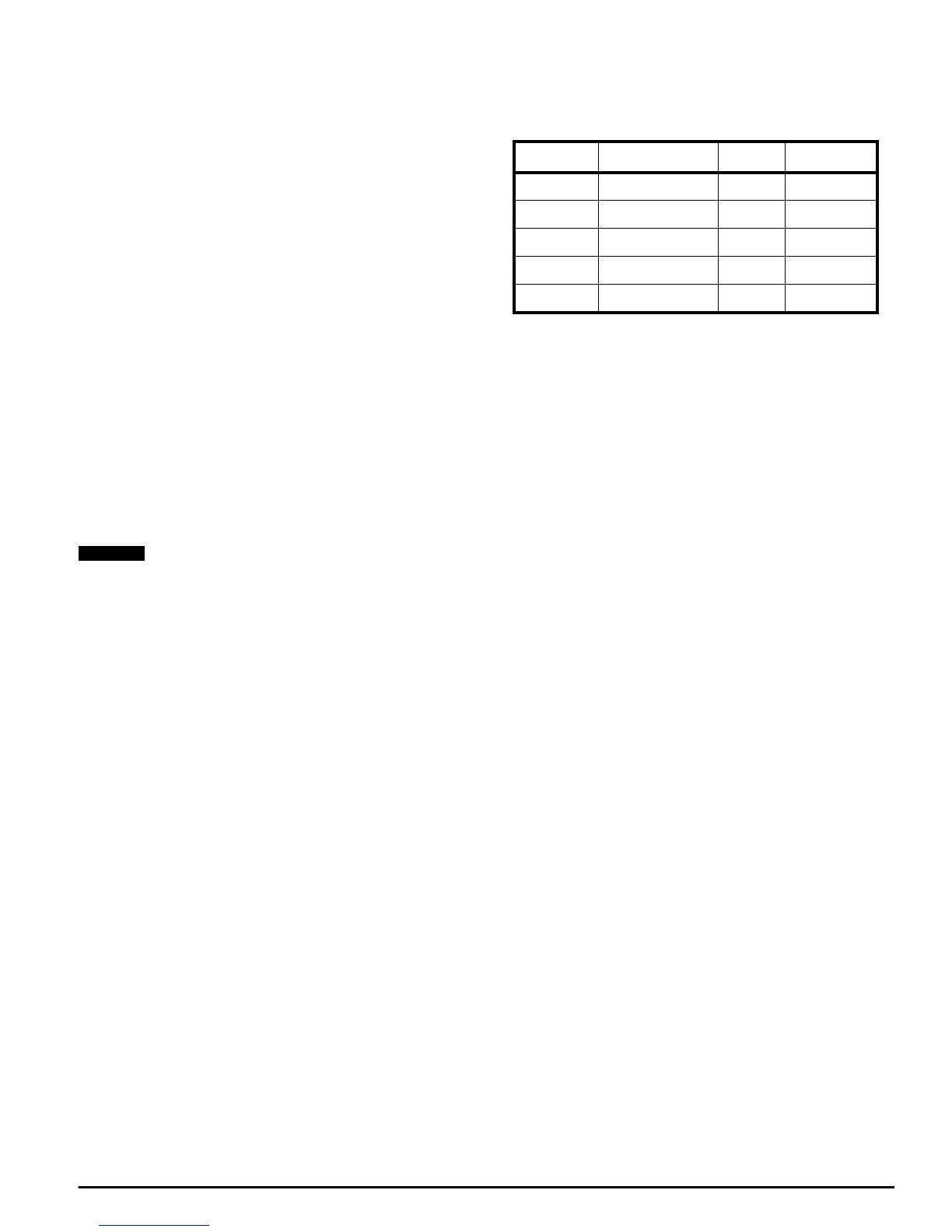
7.3.6 User-defined parameters
Although the following parameter settings are optional it is desirable to
set them because doing so allows the user to view various critical Drive
values without having to run through several menu sets to find them. All
are collected together in Menu 00
• A direct armature current reading can be read on parameter 05.02 if
05.05 is set with the appropriate scale factor. Using the same figures
as before, for an M75 Drive, in this instance the setting would be
150% of 75A, 05.05 =113.
As for the motor and Drive configuration parameters, perform a “Save
parameter values” procedure before disconnecting the Drive; refer to
section To Save the Value(s) Written on page 25.
SelectedValue
FeedbackSetting
------------------------------------------------------
0.9
2.0
---- ----
0.45==
NOTE
Parameter Drive quantity Setting Accessed at
11.01 Armature voltage 03.04 00.01
11.02 Armature current 05.02* 00.02
11.03 Motor rpm 03.03 00.03
11.04 Speed reference 01.02 00.04
11.05 AC line voltage 07.06 00.05