Mentor ll User Guide 1
Issue Number: 12 www.controltechniques.com
1 Features of Mentor II
1.1 Mentor II parameters
Mentor II is equipped with a range of parameters designed to give the
utmost flexibility of application to industrial requirements. The
parameters are arranged in menus, as being the most convenient way of
making access easy and quick for the user.
Within each menu, those parameters which are needed only for
customization of the Drive for the more complex applications have been
made invisible - that is, they are normally inaccessible except through
high level security access. With low level security access, invisible
parameters do not appear in the digital display.
This arrangement has the effect of reducing the apparent size of the
menus for greater convenience in normal use, and ensuring the
maximum protection for the parameters which are specially set up for a
particular application or process.
1.2 Supply phase-sequence
Loss of one or more phases of input is automatically detected. Drive will
run irrespective of input phase rotation.
1.3 Output
• 6-pulse firing of output thyristors (SCRs). Optionally configurable to
(series or parallel) 12-pulse operation.
1.4 Speed feedback
• Motor armature voltage, or
• Tachogenerator (tachometer), or
• Encoder (pulse tachometer).
• PIDspeedloopalgorithm.
1.5 Speed reference
• -10V to +10V
•0to10V
•4to20mA
• 20to4mA
•0to20mA
• 20to0mA
• Encoder digital input
• Internally-generated digital reference.
1.6 Serial communications interface
• RS485 serial communications port, optically-isolated.
1.7 Current feedback
• Resolution 0.1%.
• Current loop linearity 2%, bandwidth 80Hz.
• Uniform response at all current values.
1.8 Control
• All analog and most digital inputs configurable by the user for
specific applications.
• PID speed loop algorithm.
• Provision for encoder inputs for position control.
• On-board provision for tachogenerator (tachometer) calibration.
• Programmable control of field-weakening.
• Phase sequence and phase-loss detection.
• Software includes current loop self-tuning algorithm.
• Menu-driven parameter structure.
• Drive returns to last parameter adjusted in each menu.
• User-defined menu for quick access to most-used parameters.
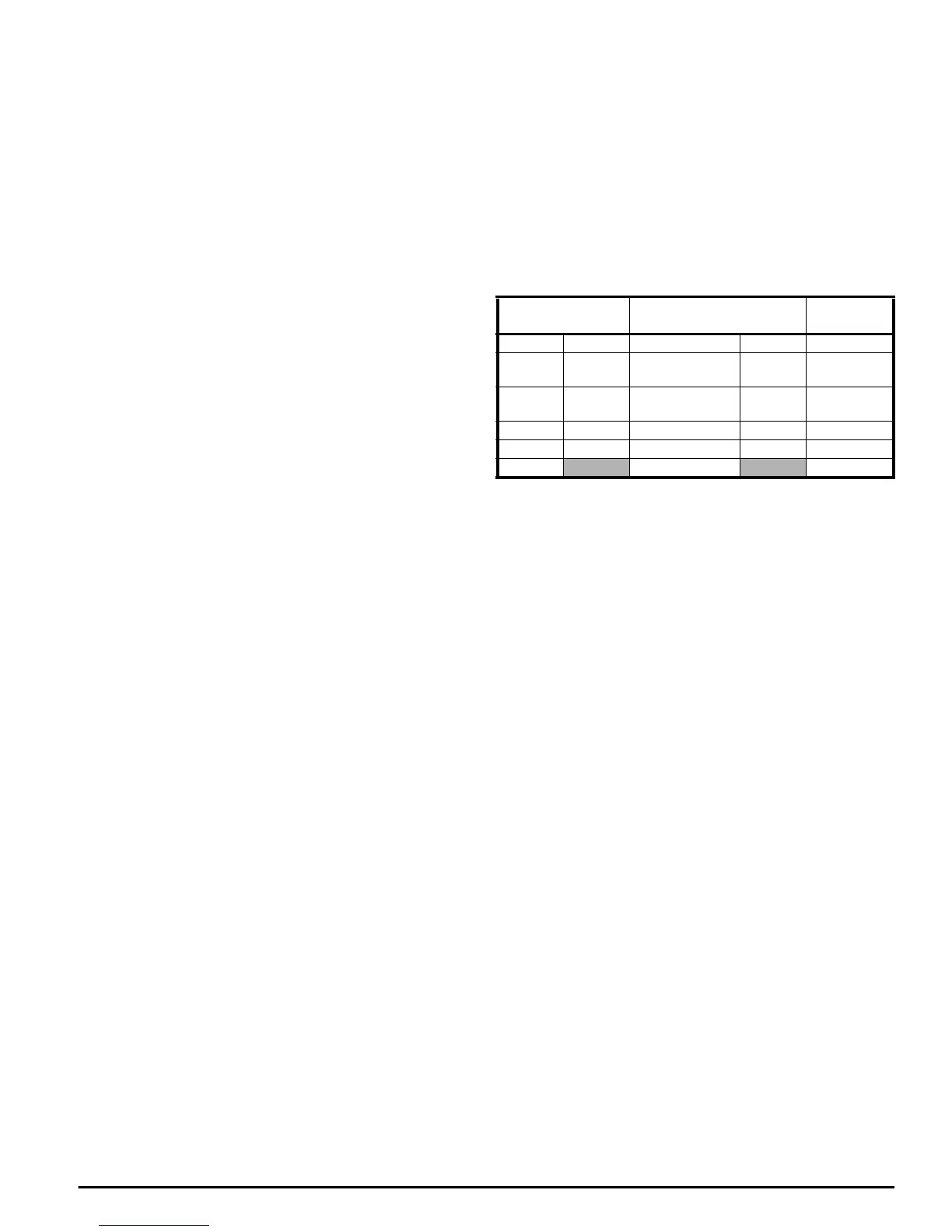
1.9 Speed resolution
Reference Feedback
Combined
resolution
Analog 0.025% Armature volts 0.83V 0.83V
Analog 0.025%
Tachogenerator
(tachometer)
0.1% 0.125%
Digital 0.1%
Tachogenerator
(tachometer)
0.1% 0.2%
Analog 0.025% Encoder 0.01% 0.035%
Digital 0.1% Encoder 0.01% 0.11%
Encoder
Encoder Absolute