42 Spyder3 SG-34 GigE Vision Color Manual
03-032-20124-00 Teledyne DALSA
bit), you can subtract off 128 (Background Subtract (DN) 2048) and then multiply by 2 (Digital Gain
(DN) 8192) to get an output range from 0 to 255.
6. The Color Correction Value (as part of the Color Matrix feature, see page 48.) adds color space
conversion functionality to the camera, allowing you to improve the color response.
Calibrating the Camera to Remove Non-
Uniformity (Flat Field Correction)
Calibration Overview
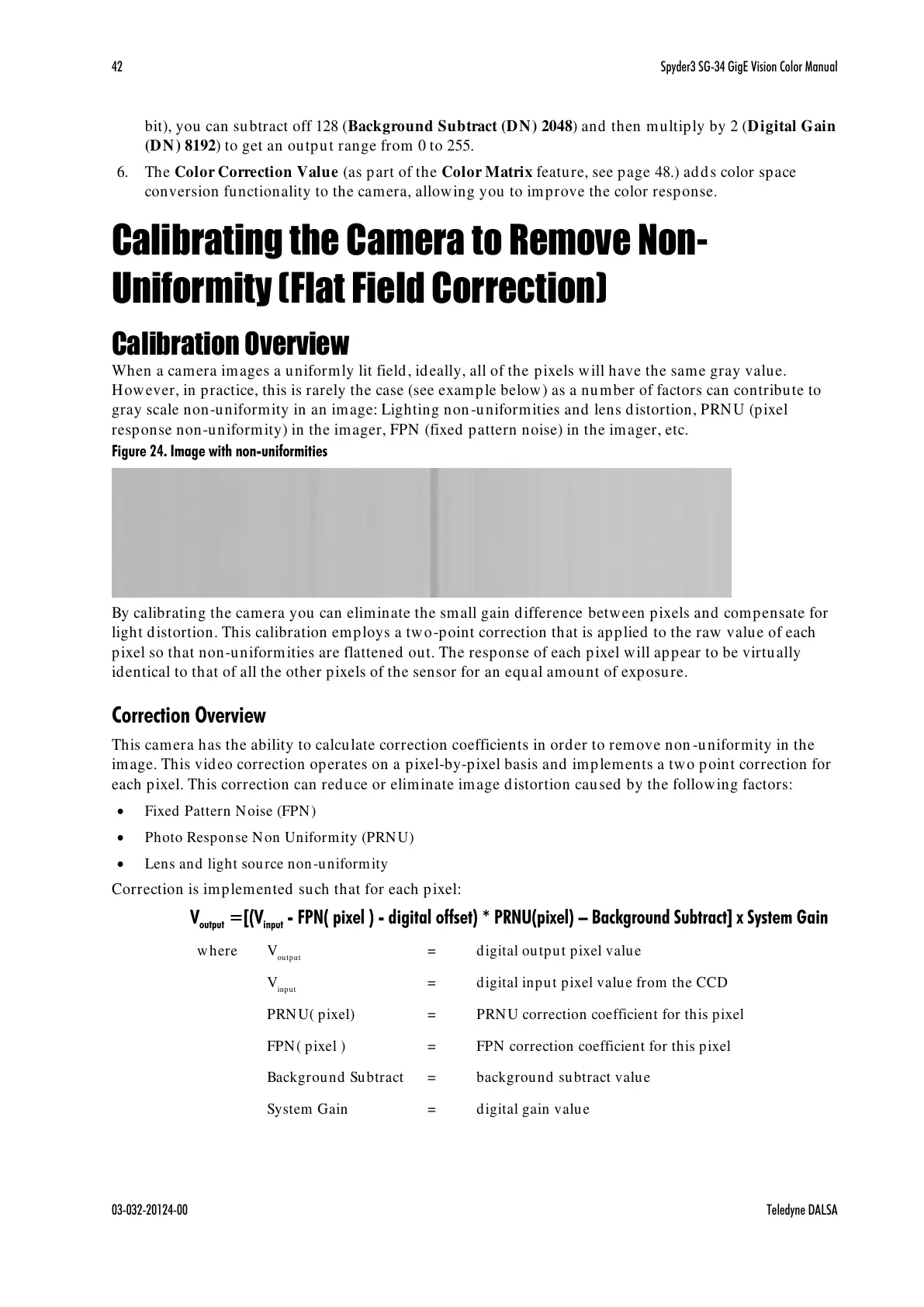
When a camera images a uniformly lit field, ideally, all of the pixels will have the same gray value.
However, in practice, this is rarely the case (see example below) as a number of factors can contribute to
gray scale non-uniformity in an image: Lighting non-uniformities and lens distortion, PRNU (pixel
response non-uniformity) in the imager, FPN (fixed pattern noise) in the imager, etc.
Figure 24. Image with non-uniformities
By calibrating the camera you can eliminate the small gain difference between pixels and compensate for
light distortion. This calibration employs a two-point correction that is applied to the raw value of each
pixel so that non-uniformities are flattened out. The response of each pixel will appear to be virtually
identical to that of all the other pixels of the sensor for an equal amount of exposure.
Correction Overview
This camera has the ability to calculate correction coefficients in order to remove non -uniformity in the
image. This video correction operates on a pixel-by-pixel basis and implements a two point correction for
each pixel. This correction can reduce or eliminate image distortion caused by the following factors:
Fixed Pattern Noise (FPN)
Photo Response Non Uniformity (PRNU)
Lens and light source non-uniformity
Correction is implemented such that for each pixel:
V
output
=[(V
input
- FPN( pixel ) - digital offset) * PRNU(pixel) – Background Subtract] x System Gain
 Loading...
Loading...