5-54 Pulse Filter Time Constant #29
Range: Function:
100
ms*
[5 -
1000 ms]
NOTICE
This parameter cannot be adjusted
while the motor is running.
Enter the pulse lter time constant. The
pulse
lter dampens oscillations of the
feedback signal, which is an advantage if
there is a lot of noise in the system. A high
time constant value results in better
dampening, but also increases the time
delay through the lter.
5-55 Term. 33 Low Frequency
Range: Function:
100 Hz* [0 - 110000
Hz]
Enter the low frequency corresponding
to the low motor shaft speed (that is
low reference value) in
parameter 5-57 Term. 33 Low Ref./Feedb.
Value.
5-56 Term. 33 High Frequency
Range: Function:
100 Hz* [0 - 110000
Hz]
Enter the high frequency corresponding
to the high motor shaft speed (that is
high reference value) in
parameter 5-58 Term. 33 High Ref./Feedb.
Value.
5-57 Term. 33 Low Ref./Feedb. Value
Range: Function:
0 ReferenceFeed-
backUnit*
[-999999.999 -
999999.999
ReferenceFeed-
backUnit]
Enter the low reference
value [RPM] for the motor
shaft speed. This is also
the low feedback value,
see also
parameter 5-52 Term. 29
Low Ref./Feedb. Value.
5-58 Term. 33 High Ref./Feedb. Value
Range: Function:
100 Reference-
FeedbackUnit*
[-999999.999 -
999999.999
ReferenceFeed-
backUnit]
Enter the high reference
value [RPM] for the motor
shaft speed. See also
parameter 5-53 Term. 29
High Ref./Feedb. Value.
5-59 Pulse Filter Time Constant #33
Range: Function:
100
ms*
[5 - 1000
ms]
NOTICE
This parameter cannot be adjusted
while the motor is running.
5-59 Pulse Filter Time Constant #33
Range: Function:
Enter the pulse lter time constant. The
low-pass lter reduces the inuence and
dampens oscillations on the feedback
signal from the control.
This is an advantage if there is a lot of
noise in the system.
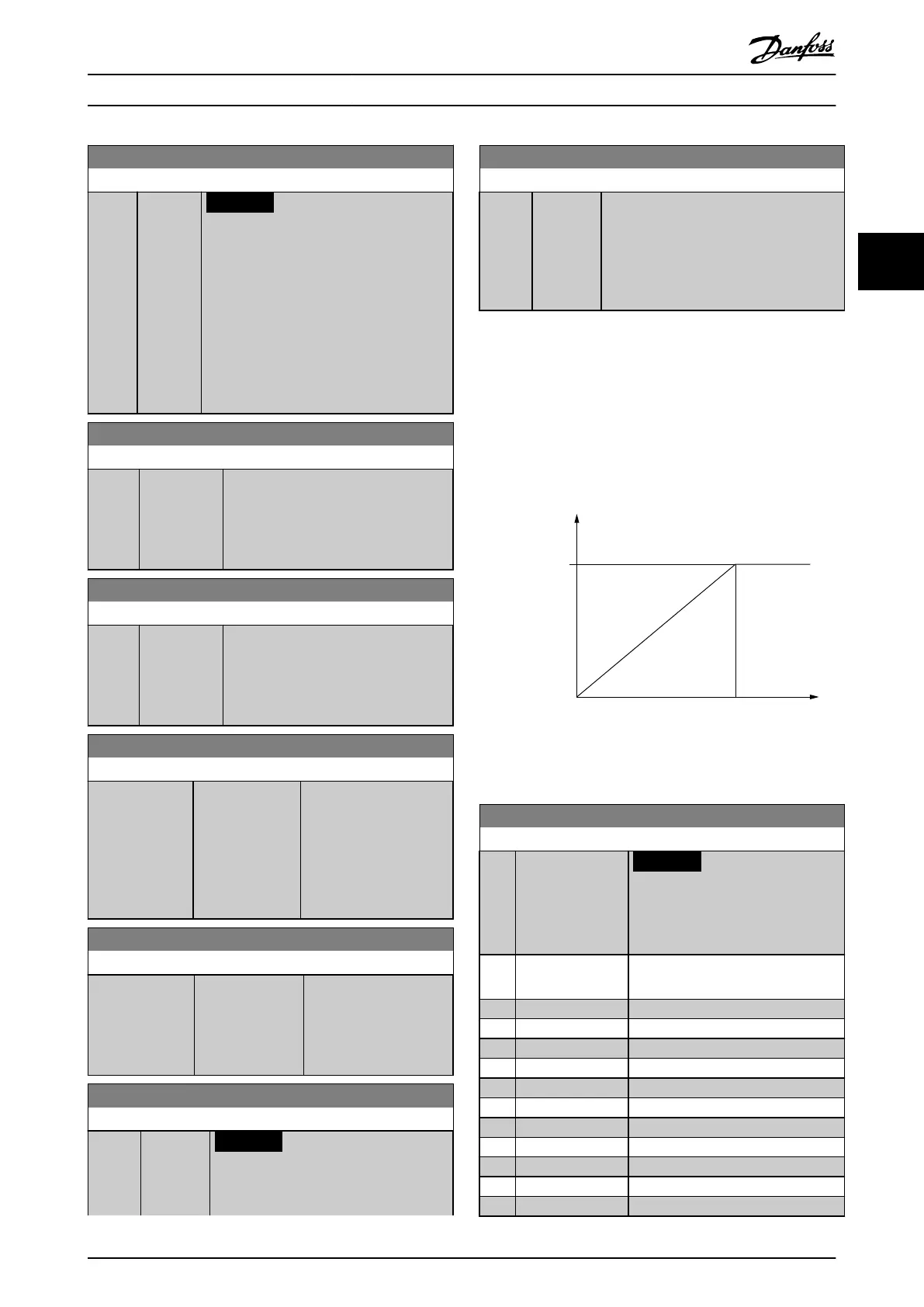
3.7.6 5-6* Pulse Outputs
Parameters for conguring the scaling and output
functions of pulse outputs. The pulse outputs are
designated to terminal 27 or 29. Select terminal 27 output
in parameter 5-01 Terminal 27 Mode and terminal 29 output
in parameter 5-02 Terminal 29 Mode.
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
Illustration 3.32 Pulse Output
5-60 Terminal 27 Pulse Output Variable
Range: Function:
NOTICE
This parameter cannot be
adjusted while the motor is
running.
[0] * No operation Select the operation variable assigned
for terminal 27 readouts.
[45] Bus ctrl.
[48] Bus ctrl., timeout
[51] MCO controlled
[100] Output frequency
[101] Reference
[102] Feedback
[103] Motor current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
Parameter Description Programming Guide
MG20OB02 Danfoss A/S © 05/2018 All rights reserved. 87
3 3

 Loading...
Loading...


















