Situation 6: “M2-1 Control Mode “Spd/Torq”” = 2 (Torque control mode with speed control mode at zero
speed) and “M1.5-1 Hill hold enable ”Off/HH/S”” =1 (Hill Hold)
In this case the controller acts to control the torque in normal drive and to control the speed below “M1.2-2 Zero speed
threshold ”ZSpdTh””. Since hill hold is selected, the parameters “M1.5-2 Hill hold time ”HHTime””, “M1.5-3 Restraint
hill hold speed ”HHspeed”” and “M1.5-4 Restraint hill hold torque threshold ”HHTrqTH”” will be active.
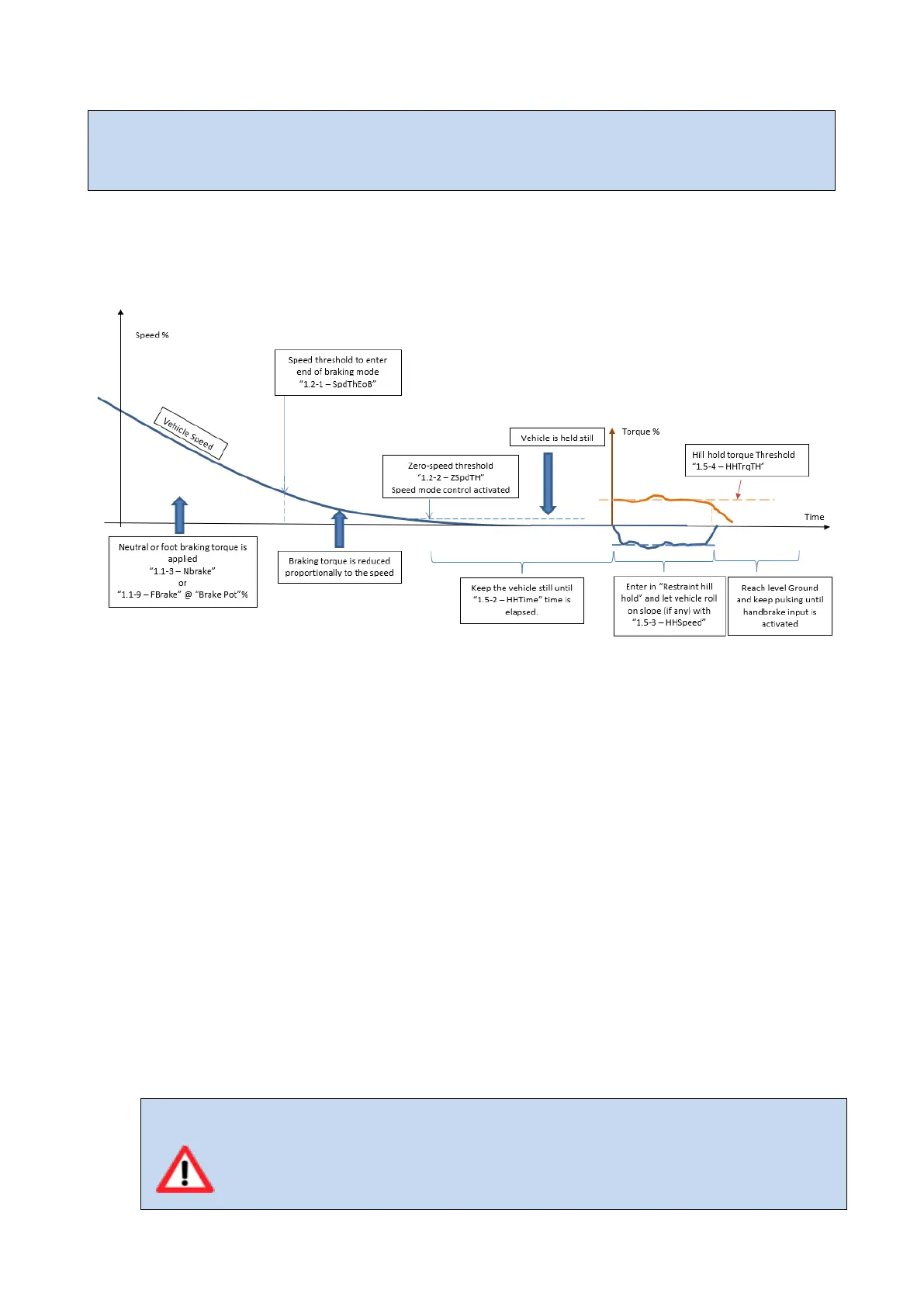
End of braking in Torque control mode with speed control mode at zero speed and hill hold enabled
The following list describes the “end of braking” steps:
1. the speed decreases according to “M1.1-3 Neutral brake torque “NBrake”” (if neutral braking is happening) or
to “M1.1-9 Foot brake torque “FBrake”” and the “Brake pot %” value (refer to “M1.7-1 Brake pot minimum
voltage level “BrkMin”” and M1.7-2 Brake pot maximum voltage level “BrkMax””) (if foot brake is operated);
2. when speed is below setting “M1.2-1 Speed threshold to enter End-of-Braking (EoB) mode ”SpdThEoB””, the
controller reduces brake torque in a smooth way (proportionally to speed) to assure a smooth stop operation;
3. when speed is below “M1.2-2 Zero speed threshold ”ZSpdTh””, the controller starts to control speed, slowing
linearly down to zero according to “M1.2-4 Ramp time from the EoB speed threshold to zero ”SpdRmpTm””;
4. when the vehicle stops, it enters in Hill Hold mode and is held still until “M1.5-2 Hill hold time ”HHTime”” time
is elapsed. The vehicle is kept still by means of speed control algorithm;
5. when “M1.5-2 Hill hold time ”HHTime”” is elapsed, two situations are possible:
a. if the vehicle is on a slope it will roll (back or forward according to the slope) at “M1.5-3 Restraint hill
hold speed ”HHspeed”” until level ground is detected, then it stops moving.
b. If the vehicle is already at level ground the vehicle is held still.
Level ground is detected when actual torque drops below “M1.5-4 Restraint hill hold torque threshold
”HHTrqTH””.
6. The controller keeps giving power to the motor until handbrake input (digital input 7) becomes active and
“M1.5-2 Hill hold time ”HHTime”” is elapsed. Otherwise the controller never stops giving power to the motor
until it is switched off! If digital input 7 is select as speed input 3 it never stops giving power to the motor even
if this is activated.