Dobot CR Series User Guide
Issue V1.1 (2023-04-27) User Guide Copyright © Yuejiang Technology Co., Ltd.
55
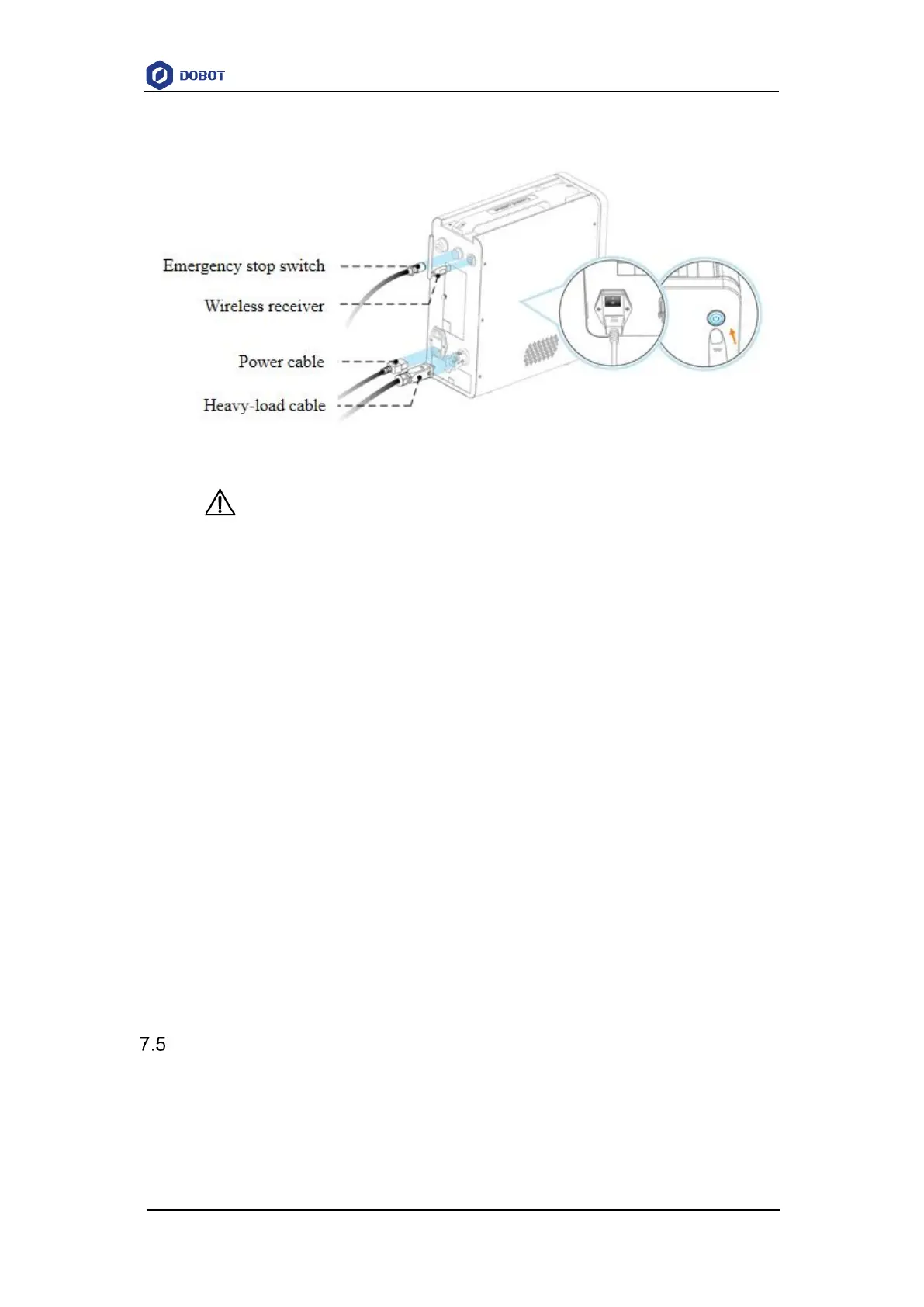
4. Plug one end of the power cable into the power interface of the controller, and the other
end into main power socket.
Figure 7.5 Controller wiring
NOTICE
⚫ Set the specifications and installation method of external cables in compliance with
local power distribution laws and regulations.
⚫ Do not remove the controller by yourself, otherwise it may cause electricity leakage.
⚫ Make sure the device is grounded.
⚫ Do not bend the cable excessively, otherwise it may cause poor contact or cable
breakage.
⚫ Make sure the power outlet for the control system is disconnected when connecting
an external device, otherwise it may cause an electric shock or device failure.
⚫ Use supporting cables to protect device and personal safety.
⚫ After wiring, ensure that there are no fallen screws or exposed cables in the device.
⚫ Do not plug or remove the power cable or communication cable when the device is
running normally.
⚫ Power on the device only after connecting all the cables required.
⚫ Ensure that the cables are connected correctly, otherwise, it may cause fault in
internal modules or external devices.
⚫ Before connecting, check whether there is breakage in the insulation and shield of
the external cables.
Debugging
After turning on the external power supply, press the switch above the power interface to "|",
and then short press the circular button in front of the controller. When the indicator lights at the end
of the robot arm and on the controller turn blue, you can connect the robot arm, enable it and jog it
for debugging through the operation terminal.