Dobot CR Series User Guide
Issue V1.1 (2023-04-27) User Guide Copyright © Yuejiang Technology Co., Ltd.
47
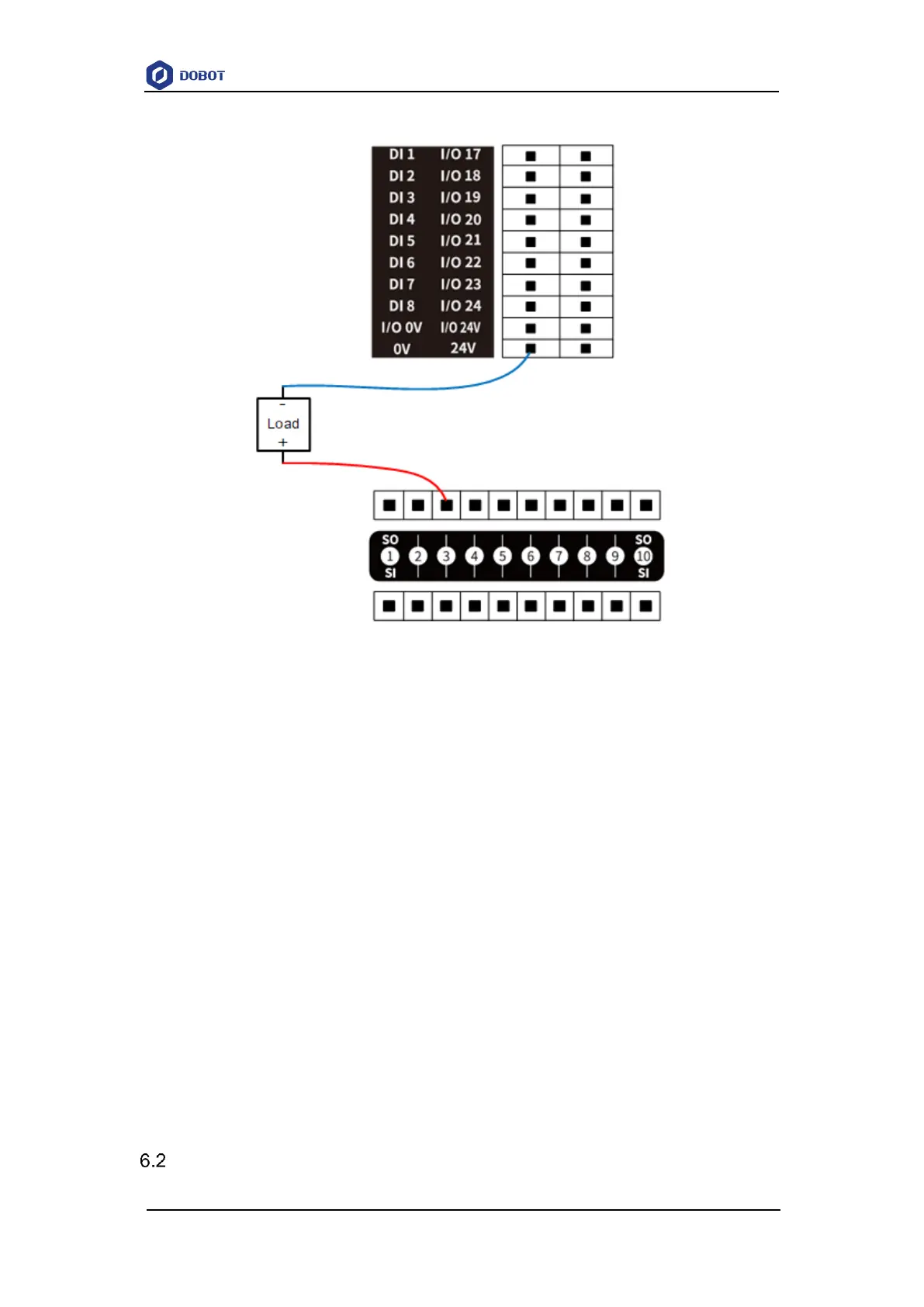
interface panel. The figure below only shows an example.
Figure 6.14 SO connected to external load
Running state output interface
The running state output interface is used to confirm whether the robot is in running state. The
output voltage is low level in the running state, and high level in the non-running state.
Non-stop state output interface
The non-stop state output interface is used to check whether the script is running. The output
voltage is low level when the script is running, and high level when the script is not running.
Reduction mode state interface
The reduction mode state output interface is used to check whether the robot enters the
reduction mode. The output voltage is low level when the robot is in the reduction mode, and high
level when the robot is in the normal mode.
NOTE
If the firmware version of the controller is lower than 3.5.4, the level definition of security
output is opposite.
Robot interface