How to use
60
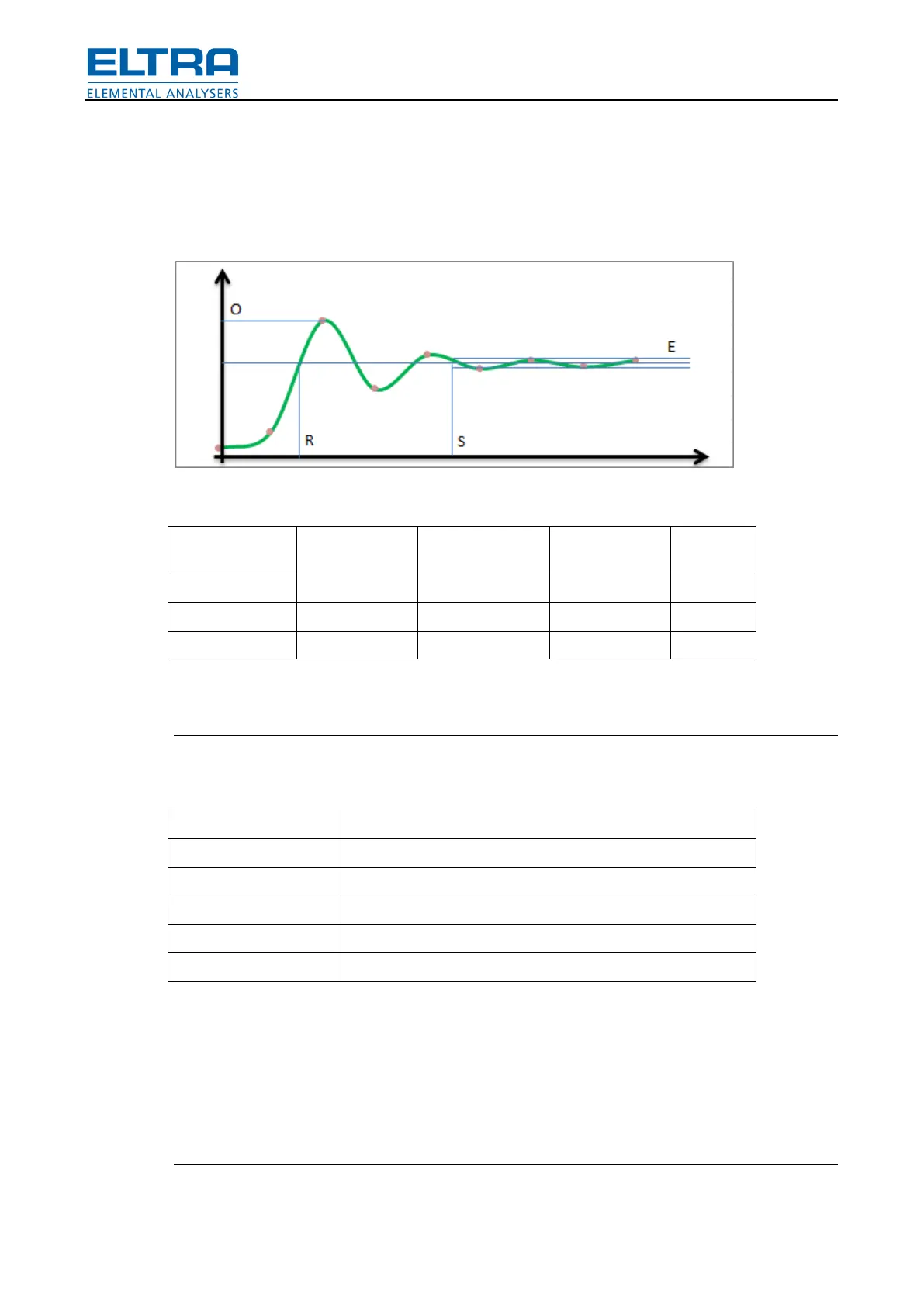
slope become small enough (less than specified value). As soon as this happens, a new
setpoint will be set, this time equal to the setpoint value itself, and regulating phase will start.
Switching from regulating to heating will occurs automatically, whenever setpoint is two times of
threshold higher, than the actual temperature.
Fig.
: PID regulation
Factors
There could be multiple ranges (with overlaps if necessary). Each range can have following
factors.
P – proportional factor and its limits
I – integral factor and its limits
D – differential factor and its limits
There is a guaranteed overshoot, to reduce it following solution is used: initially regulator is
trying to reach setpoint minus threshold temperature. Switch to real setpoint occurs after that
and additionally after slope become less than specified. Threshold and slope has to be chosen
experimentally to compensate overshoot and at the same time without delaying reaching
setpoint.
Security
There are certain features to ensure the safety of heating process.

 Loading...
Loading...



