Safety
information
Product
information
Mechanical
installation
Electrical
installation
Getting
started
User Menu A
Commissioning
Advanced
Parameters
Diagnostics Optimization CT MODBUS RTU Technical Data
166 E300 Design Guide
Issue Number: 1
The operating speeds for the E300 Advanced Elevator drive are V1, V2, V3 and V4. V1 is selected by default as the Creep speed with V2, V3 and V4
being user defined speeds. The selected operating speed can be seen in Reference Parameter Selected (J09).
7.8 Travel
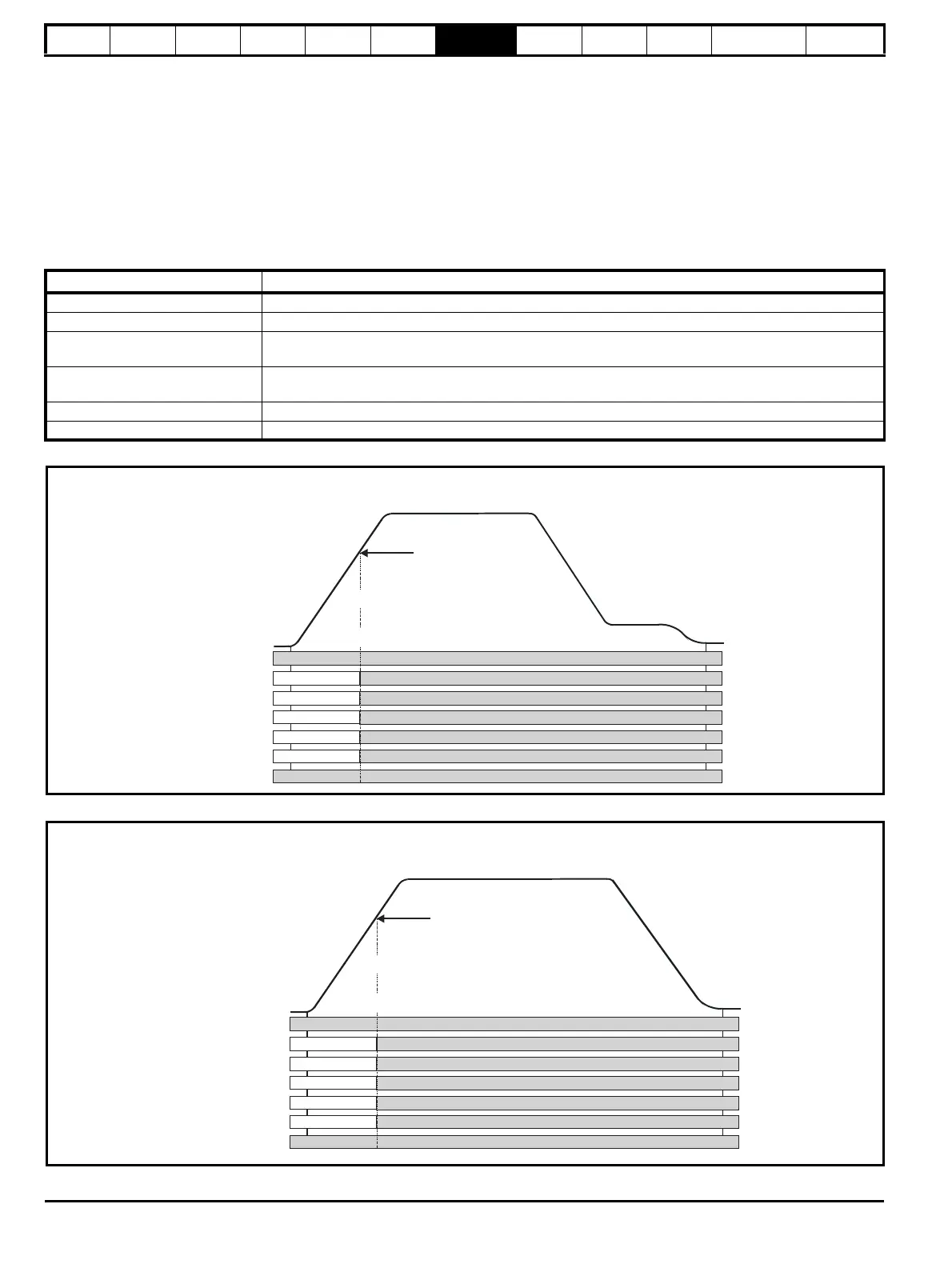
The travel profile for the Elevator system can be configured and adjusted using the following profile parameters and control loop gains. For Closed
loop operation, there are both speed loop and current control loop gains available. The following parameters are active from the end of acceleration
(Run jerk 2), and Travel and start of deceleration (Run jerk 3).
The operating speeds for the E300 Advanced Elevator drive are V1, V2, V3 and V4. V1 is selected by default as the Creep speed with V2, V3 and V4
being user defined speeds. The selected operating speed can be seen in Reference Parameter Selected (J09).
7.8.1 Travel profile and control loop gains
Table 7-21 Travel profile parameters
Figure 7-12 Creep to floor profile travel
Figure 7-13 Direct to floor profile travel
Parameter Details
Run Jerk 2 (G14) End of acceleration jerk
Run Jerk 3 (G15) Start of deceleration jerk
Run Speed Loop P Gain (I06)
Run Speed Loop I Gain (I07)
Run speed control loop gains active at the end of start speed control loop gains speed threshold level to the
stop.
Run Current Loop P Gain (I08)
Run Speed Loop I Gain (I09)
Run current control loop gains = autotune values
Run Current Loop Filter (I10) Current loop filter from start threshold to run and stop from default.
Drive Encoder Feedback Filter (C09) Position feedback
Drive active
Run speed loop Kp
Run speed loop Ki
Run current loop Kp
Run current loop Ki
Run current loop filter
Position feedback filter
Run Current Loop Filter ()I10
Run Speed Loop P Gain ()I06
G11 ( )Acceleration Rate G11
Run Jerk 3 ()G15
Deceleration Rate ()G12
V2 Speed Reference ()G02
V3 Speed Reference ()G03
V4 Speed Reference ()G04
Run Jerk 2 ()G14
Variable Gains Transition
Speed Threshold
()I16
Run Speed Loop I Gain ()I07
Run Current Loop P Gain ()I08
Run Current Loop I Gain ()I09
Drive Encoder Feedback Filter
()C09
Drive active
Run speed loop Kp
Run speed loop Ki
Run current loop Kp
Run current loop Ki
Run current loop filter
Position feedback filter
Run Current Loop Filter ()I10
Run Speed Loop P Gain ()I06
Acceleration Rate ()G11
Run Jerk 3 ()G15
Deceleration Rate ()G12
V2 Speed Reference ()G02
V3 Speed Reference ()G03
V4 Speed Reference ()G04
Run Jerk 2 ()G14
Variable Gains Transition
Speed Threshold
()I16
Run Speed Loop I Gain ()I07
Run Current Loop P Gain ()I08
Run Current Loop I Gain ()I09
Drive Encoder Feedback Filter
()C09

 Loading...
Loading...
