Safety
information
Product
information
Mechanical
installation
Electrical
installation
Getting
started
User Menu A
Commissioning
Advanced
Parameters
Diagnostics Optimization CT MODBUS RTU Technical Data
162 E300 Design Guide
Issue Number: 1
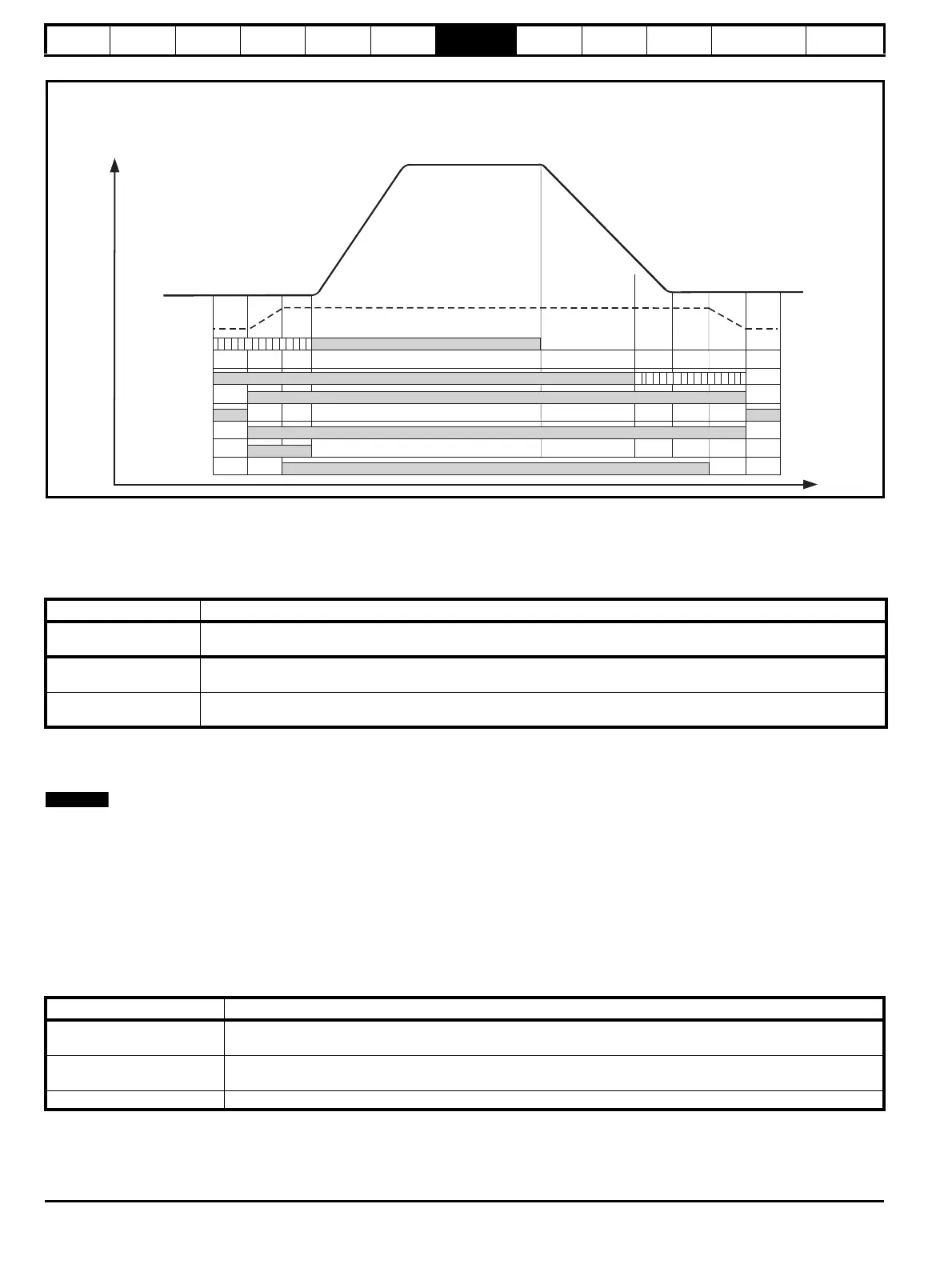
Figure 7-7 Direct to floor profile, timing diagram
7.7 Creep to floor / Direct to floor - Start
For geared and gearless Elevator applications operating in Creep to floor mode / Direct to floor mode, the start performance can be optimized using
the following procedure. For open loop operation only the start optimizer is available.
Table 7-15 Start set-up control
7.7.1 Start lock on brake release control
The start lock uses a position controller for the start and can be used to prevent roll back on brake release. The start lock holds the Elevator car in
position following Drive enable and opening of the brake. Once the profile is started the start lock position control is disabled.
The start lock position control is only available for Closed loop operation, and is by default disabled.
Closed loop operation
Start locking is independent of the start speed loop gains, and may be required where increased start speed loop gains are not possible due to
instability associated with low resolution speed feedback devices or acoustic noise from the motor.
The maximum values for the start lock Kp gain will be limited by the settings of the active start speed loop gains. Under normal operation, the variable
speed loop gains alone should be sufficient to hold the motor during brake release and prevent rollback. Therefore the start speed loop gains should
be optimized before enabling the start lock position control.
If "STOP" is displayed on the keypad, the position controller does not operate as no speed has been selected and the motor’s brake is closed.
Table 7-16 Start lock position control parameters
Feature Details
Speed control loop gains
For Closed loop operation the Start Speed Loop P Gain (I01) and Start Speed Loop I Gain (I02) gains can be used for
optimization
Start lock
A start lock position control is available for Closed loop operation and used in addition to the start speed loop gains. This
control is mainly used in gearless applications where high start speed loop gains may not possible.
Start optimizer
The start optimizer is available for both Open and Closed loop operation with either geared or gearless Elevators. The
start optimizer is mainly used to overcome mechanical imperfections in the system.
Parameter Details
Start Lock P Gain (I20)
Setting to > 0 results in the Elevator car being held in position during brake release. The maximum detectable
position error is determined by the level of proportional gain.
Start Lock P Gain Speed
Clamp (I21)
Speed clamp, defines the rate of change of correction for the start locking. Default value is suitable for most
applications.
Start Lock Enable (I22) Enable, disable start lock position.
Drive active
Direction
FAST disable
STO, Drive enable
Start lock
Speed selection
Torque producing current
Debounce motor contac
tors (100 ms)
Brake Control Apply Delay ( )D05
Interlock delay (> 50 ms)
Control terminal 26
Run Jerk 1 ()G13
Run Jerk 2 ()G14
V1 Speed Reference ()G01
V10 ()G10Speed Reference
Ramp torque (100 ms)
Ramp torque (100 ms)
Control terminal 7 (V2), 26 (V3), 5 (V4)
Control terminal 28
Control terminal 31
Drive active, L06
Brake output
Control terminal 25
Start lock position Kp, 120
External motor contactor control
External motor contactor control
Run Jerk 3 ()G15
Brake Control Release Delay ()D04
Acceleration Rate
()G11
Deceleration Rate
()G12
Run Jerk 4 ()G16
Brake Control Apply Delay ()D05
 Loading...
Loading...

