CG Drives & Automation 01-7492-01r1 Functional description 127
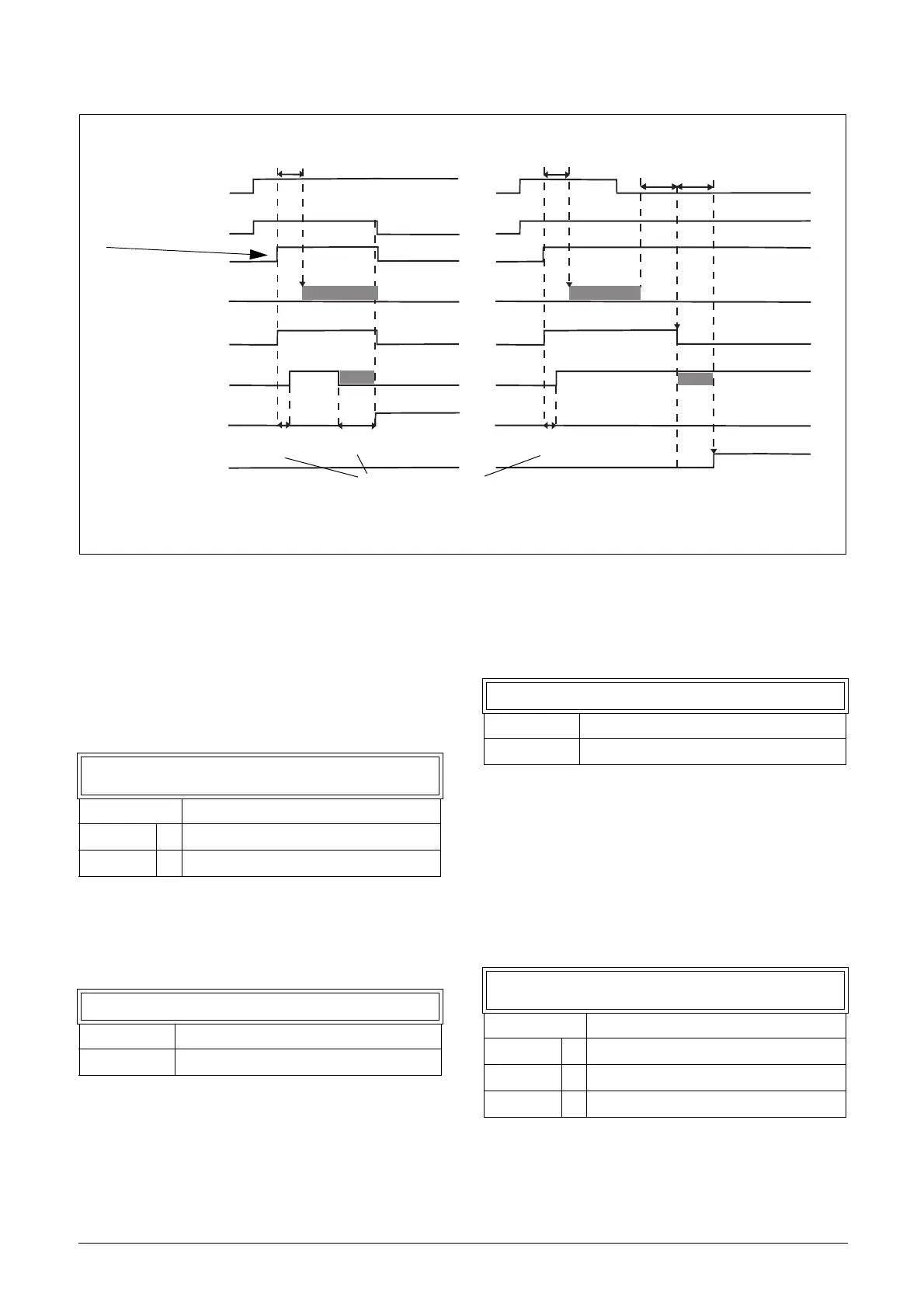
Fig. 102 Principle of Brake operation for fault during run and during stop.
DC Hold [33J]
This function makes it possible to apply a DC-voltage to the
motor at zero speed. This provides a (low) holding torque.
This function is only available in speed mode.
DC Hold [33J1]
Enabling of DC hold functionality.
DC Holding Speed [33J2]
Select the speed at which DC hold is released / enabled.
DC hold is activated if both the speed and the speed
reference is below this value.
DC Holding Current [33J3]
Select the applied DC hold current in percent of nominal
motor current.
Start Vector [33K]
Select the voltage vector applied at start. The start vector is
normally in the direction of the U-phase. It is also possible
to sequentially select different start vectors each start. This
can be advantageous as it distributes the wear more evenly
between different IGBTs. In particular if DC-start is used.
The start vector may also be selected based on the encoder
position (when applicable).
Brake warning
Brake Trip
Brake acknowledge
Brake relay
Speed>0
Torque
Running
Start
During run
During stop
Brake
<33H
33H
<33H
Brake
Brake wait
time
Brake engage
time
33F
33E
33C
33C
release time
release time
Brake Fault trip time
*
**
* Memorized load torque level, if function activated with parameter [33I] Release Torque.
** Time for operator to set down the load.
33J1 DC Hold
Default: Off
Off 0
On 1
33J2 DC Hold Spd
Default: 10rpm
Range: 0 - 250 rpm
33J3 DC Hold Cur
Default: 30 %
Range: 0 - 100 %
33K Start Vector
Default: Normal (U)
Normal (U) 0 U-phase
Sequence 1 Sequentially select different vectors
Encoder 2 Based on encoder position

 Loading...
Loading...

