5.4.1. Supported RTCM3 messages
Besides meeting the general requirements for correction service data, the Vision-RTK2
requires that the latency (age) of the data should be kept as low as possible (ideally better
than 1 second) and at least the following RTCM3 messages for proper operation:
Type Message
Reference station position
- Update rate: every 10s or less
One of the following:
- RTCM type 1005 (Stationary RTK reference station ARP)
-
RTCM type 1006 (Stationary RTK reference station ARP
with antenna height)
GPS observables
- Update rate: 1Hz
One of the following:
- RTCM type 1074 (GPS MSM4)
- RTCM type 1075 (GPS MSM5)
- RTCM type 1077 (GPS MSM7)
Galileo observables
- Update rate: 1Hz
One of the following:
- RTCM type 1094 (Galileo MSM4)
- RTCM type 1095 (Galileo MSM5)
- RTCM type 1097 (Galileo MSM7)
BeiDou observables
- Update rate: 1Hz
One of the following:
- RTCM type 1124 (BeiDou MSM4)
- RTCM type 1125 (BeiDou MSM5)
- RTCM type 1127 (BeiDou MSM7)
GLONASS observables
- Update rate: 1Hz
One of the following:
- RTCM type 1084 (GLONASS MSM4)
- RTCM type 1085 (GLONASS MSM5)
- RTCM type 1087 (GLONASS MSM7)
GLONASS code-phase biases
- Update rate: every 5s or less
- RTCM type 1230
Table 5.5.: List of required RTCM3 input messages
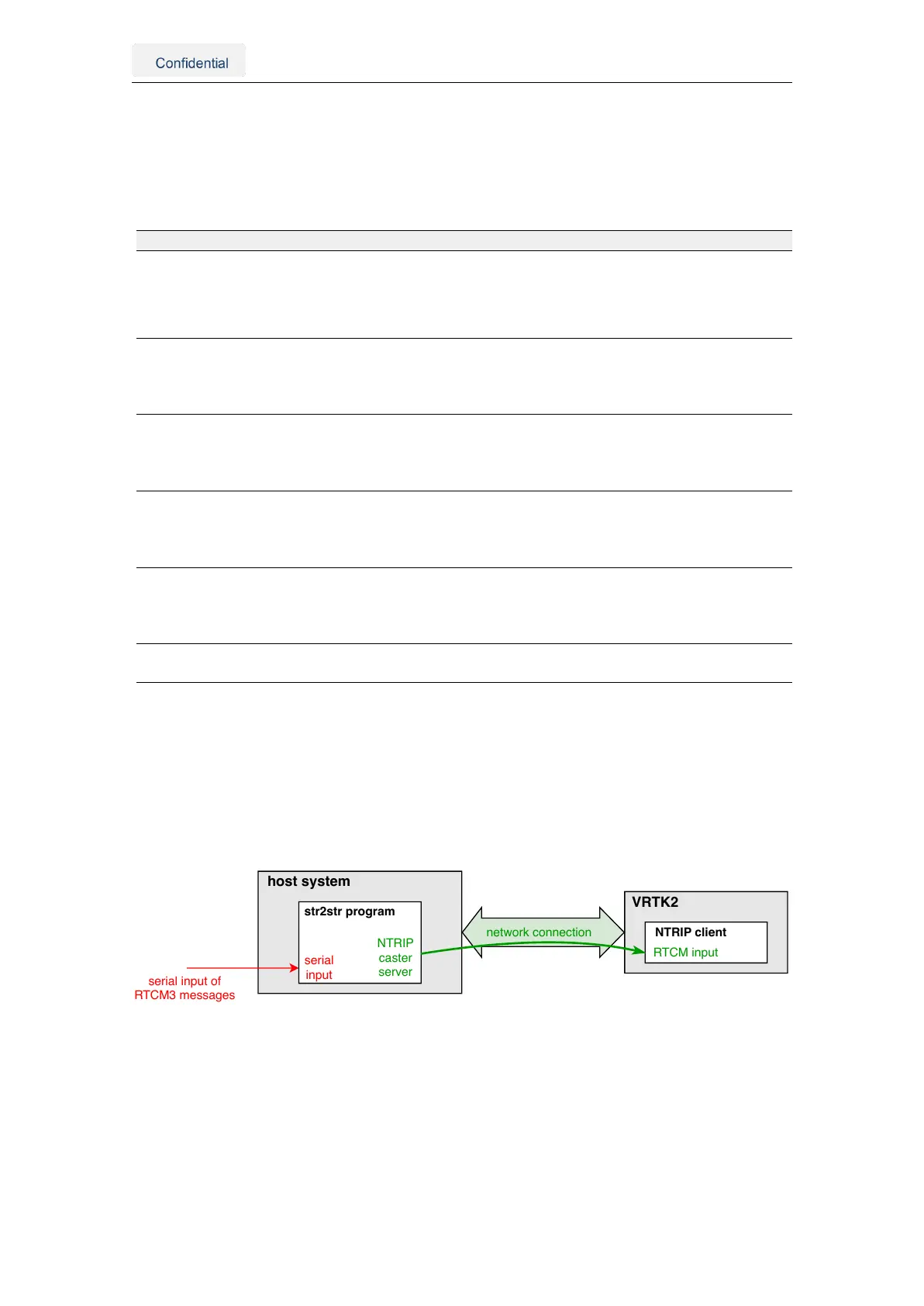
5.5. Local NTRIP caster
Alternatively, the user can set up a local NTRIP caster to stream correction data to the
Vision-RTK 2. In the example below, a host system receives RTCM3 as a serial input and
streams them to the Vision-RTK 2 via a network connection using its NTRIP client.
network connection
serial input of
RTCM3 messages
host system
VRTK2
str2str program
serial
input
NTRIP
caster
server
NTRIP client
RTCM input
Figure 5.15.: Workflow diagram of the str2str program combined with the Vision-RTK 2
The RTKLIB str2str program can divide an input stream into multiple streams with different
formats. For additional information, refer to https://rtkexplorer.com/pdfs/manual_demo5.pdf.
Vision-RTK 2 | Fixposition Positioning Sensor 28