5.7.2. Fixposition I/O wheelspeed sensor
For streaming the wheelspeed values via the UART or TCP ports, the user must employ
the NOV_B-RAWDMI message format detailed in Subsection 7.1.1. The binary message
must be input on a UART/TCP port at a regular interval with a maximum input rate of 50
Hz. The message latency, measured from computing the wheelspeed to broadcasting it
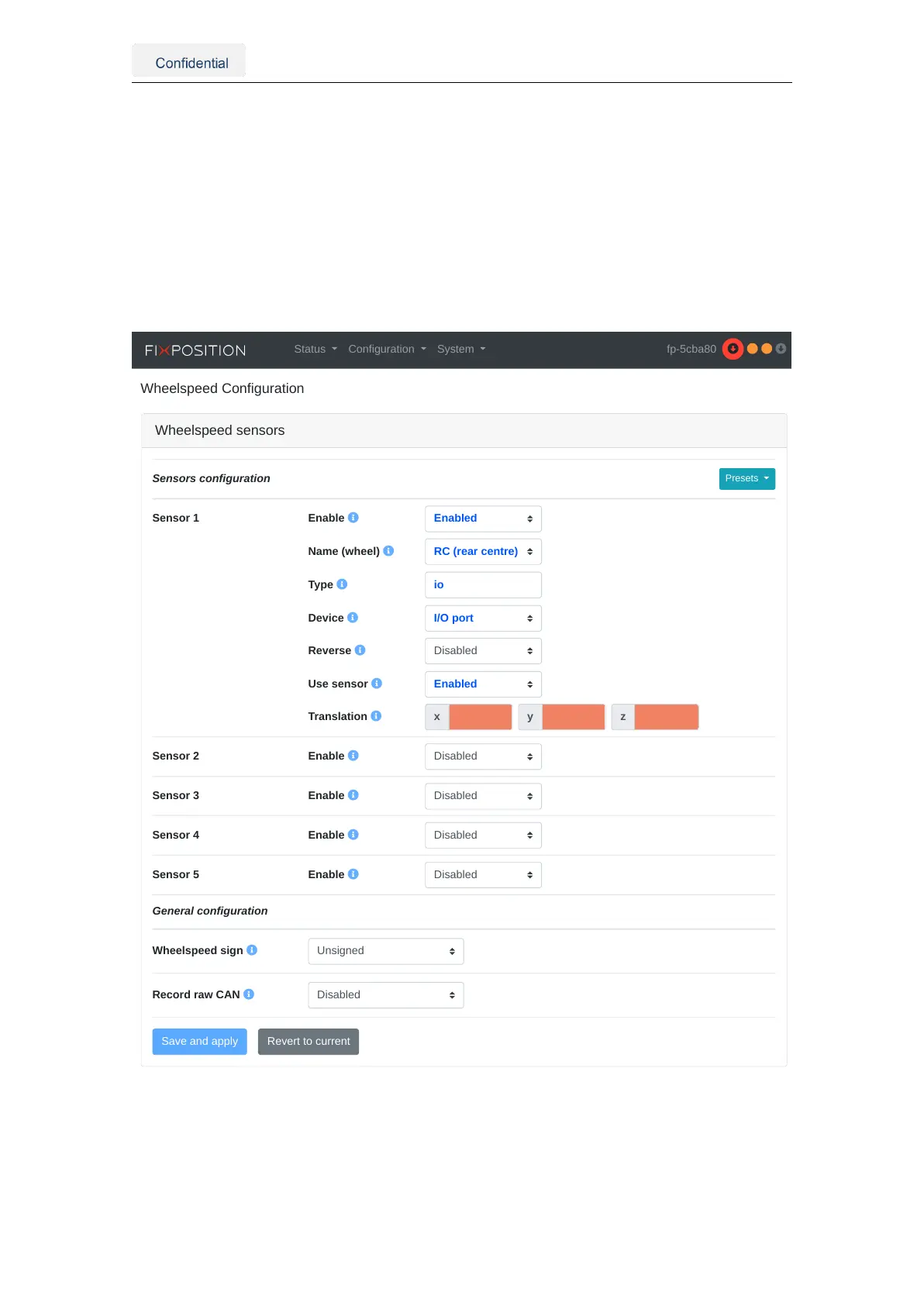
over the I/O port, must be as low as possible. The low-level sensor parameters are auto-
matically filled in when one of the preset settings is selected. For example, Figure 5.20
presents the configuration when the "I/O message (vehicle speed, I/O port)" preset is
selected.
Wheelspeed sensors
Presets
Sensor 1 Enable
Name (wheel)
Type
Device
Reverse
Use sensor
Translation
Sensor 2 Enable
Sensor 3 Enable
Sensor 4 Enable
Sensor 5 Enable
General configuration
Wheelspeed sign
Record raw CAN
Sensors configuration
Status Configuration System fp-5cba80
Figure 5.20.: I/O message (vehicle speed) preset configuration
Vision-RTK 2 | Fixposition Positioning Sensor 35