7.6.5. NOV_B-HEADING2
This message contains only the heading from GNSS measurements; no Fusion data is
used here. The heading is defined as the angle from the true North of GNSS1 to the
GNSS2 vector in a clockwise direction.
«««< HEAD Message fields: ======= »»»> 1139621469714e6f7dd1fd87f490b58da633d00a
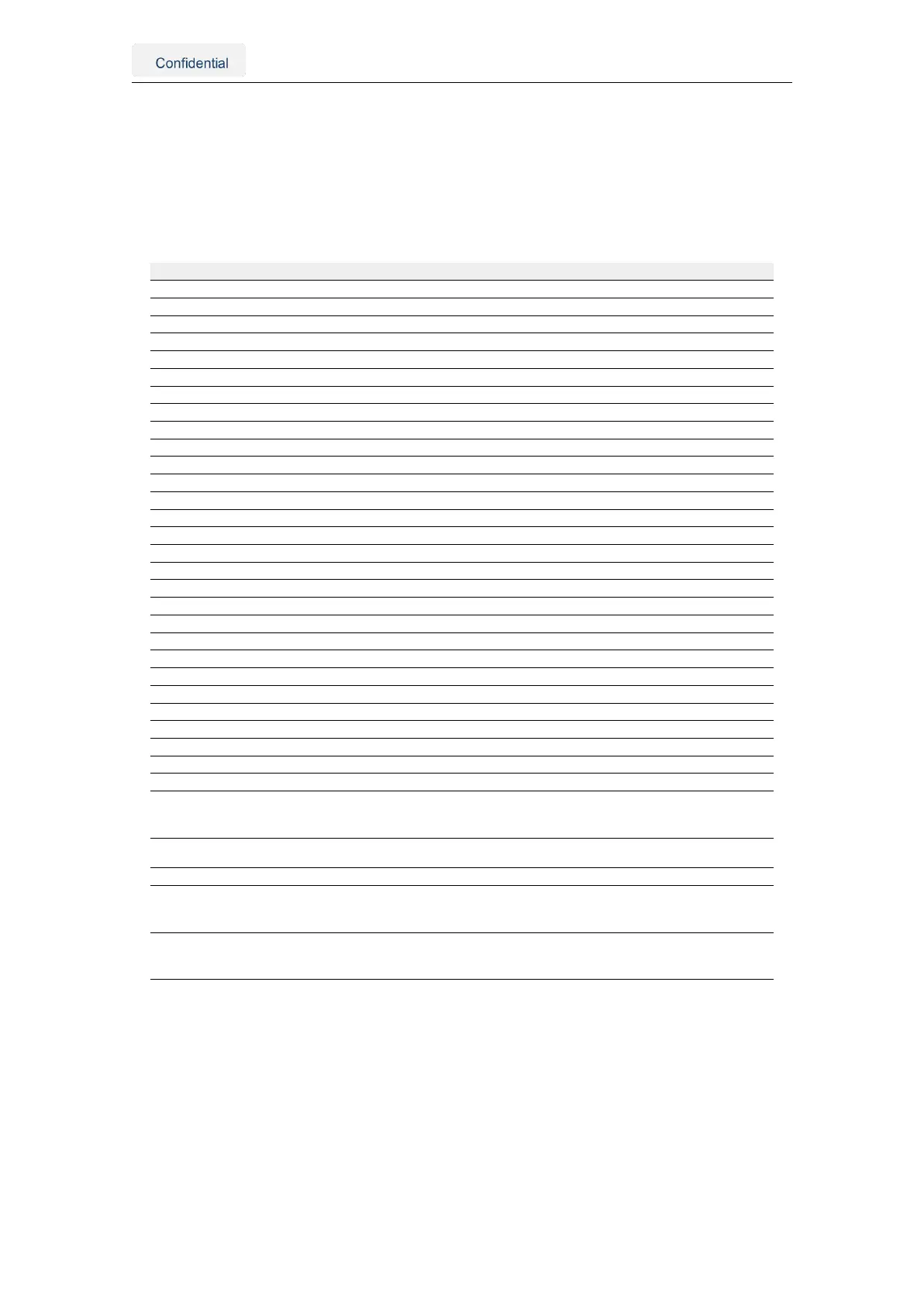
# Offset Field Type Unit Description
- 0 sync1 uint8_t - Sync byte 1 (always 0xaa)
- 1 sync2 uint8_t - Sync byte 2 (always 0x44)
- 2 sync3 uint8_t - Sync byte 3 (always 0x12)
- 3 header_len uint8_t bytes Length of the header (always 28)
- 4 msg_id uint16_t - Message ID, always 1335 for this message
- 6 msg_type uint8_t - See protocol documentation
- 7 reserved1 uint8_t - Reserved, ignore
- 8 payload_len uint8_t bytes Payload size, always 48 for this message
- 10 reserved2 uint16_t - Reserved, ignore
- 12 reserved3 uint8_t - Reserved, ignore
1 13 time_status uint8_t - See protocol documentation
2 14 gps_wno uint16_t - GPS week number
3 16 gps_tow int32_t ms GPS time of week
- 20 reserved4 uint32_t - Reserved, ignore
- 24 reserved5 uint16_t - Reserved, ignore
- 26 reserved6 uint16_t - Reserved, ignore
4 28 sol_status uint32_t - Solution status, see below
5 32 pos_type uint32_t - Positioning mode, see below
6 36 length float m Baseline length
7 40 heading float deg Heading
8 44 pitch float deg Pitch
- 48 reserved7 uint32_t - Reserved, ignore
- 52 reserved8 uint32_t - Reserved, ignore
- 56 reserved9 uint32_t - Reserved, ignore
- 60 reserved10 uint32_t - Reserved, ignore
- 64 reserved11 uint32_t - Reserved, ignore
9 68 num_svs uint8_t - Number of satellites tracked
10 69 num_sol_svs uint8_t - Number of satellites used in solution
- 70 reserved12 uint16_t - Reserved, ignore
11 72
sol_source
_msk
uint8_t - Bitfield:
- sol_source
- bits 3. . . 2
- Solution source, see below
12 73 ext_sol_stat uint8_t - Extended solution status, see below
13 74
gal_bds_sig
_msk
uint8_t - Galileo and BeiDou signal mask, see below
14 75
gps_glo_sig
_msk
uint8_t - GPS and GLONASS signal mask, see below
Table 7.26.: NOV_B-HEADING2 message format
Vision-RTK 2 | Fixposition Positioning Sensor 71