5.12. Point of interest configuration
The default reference frame of the VRTK2 is located at the X shape on the sensor housing
(see section 2.3). If the user requires the odometry output in a different reference frame,
the "Output translation" meaning "Translation from the sensor to output represented by
x-y-z Cartesian coordinates" and "Output rotation" meaning "Rotation from the sensor
to output represented by Roll-Pitch-Yaw (RPY) in the Cartesian coordinates" fields in the
"Output generators" module of the web interface can be used (see Figure 5.11).
The XYZ displacements from the center of the VRTK2’s reference frame to the desired
point are expressed in meters. In contrast, the rotation from the sensor’s frame to the
output’s body frame is expressed in degrees using Roll-Pitch-Yaw (RPY) rotations, also
known as Euler Angles. For reference, the arrow on the web interface’s map page points
towards the output frame’s positive X direction (see Figure 5.29).
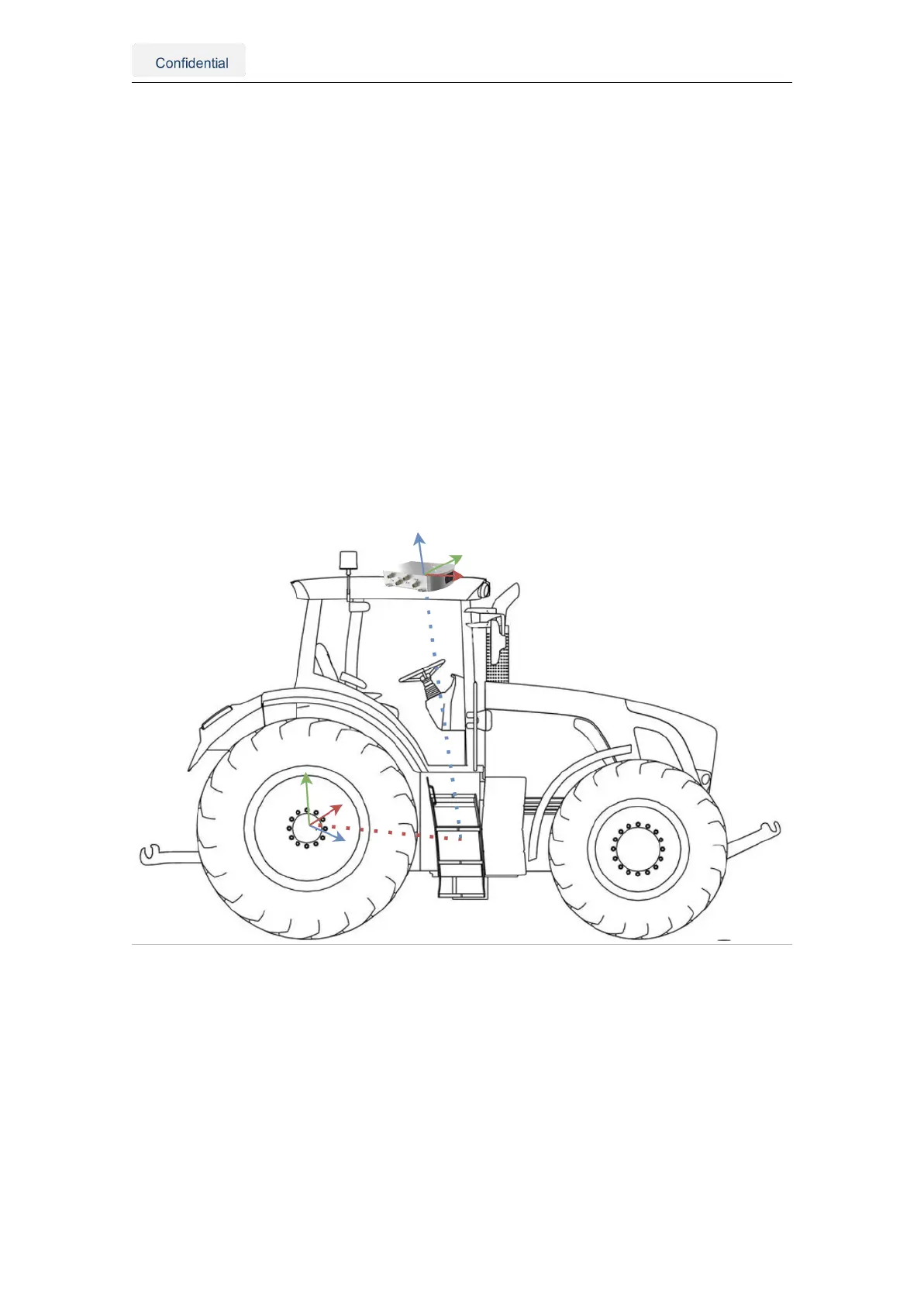
For reference, Figure 5.28 shows an example of a transformation between the VRTK’s
body frame and the output’s body frame using the previously described convention. In
this example, the point of interest (POI) is located at an arbitrary point inside the vehi-
cle. Therefore, the user must calculate the XYZ translations from the sensor’s frame of
reference to the POI and then rotate the frame using RPY angles.
Figure 5.28.: Transform from the VRTK2’s body to the output reference frame
Vision-RTK 2 | Fixposition Positioning Sensor 42