CHAPTER C
Coordinate Transformations
Z
Y
East
Up
ECEF
ECEF
North Pole
North
(Y
local
)
(Z
local
)
(X
local
)
X
ECEF
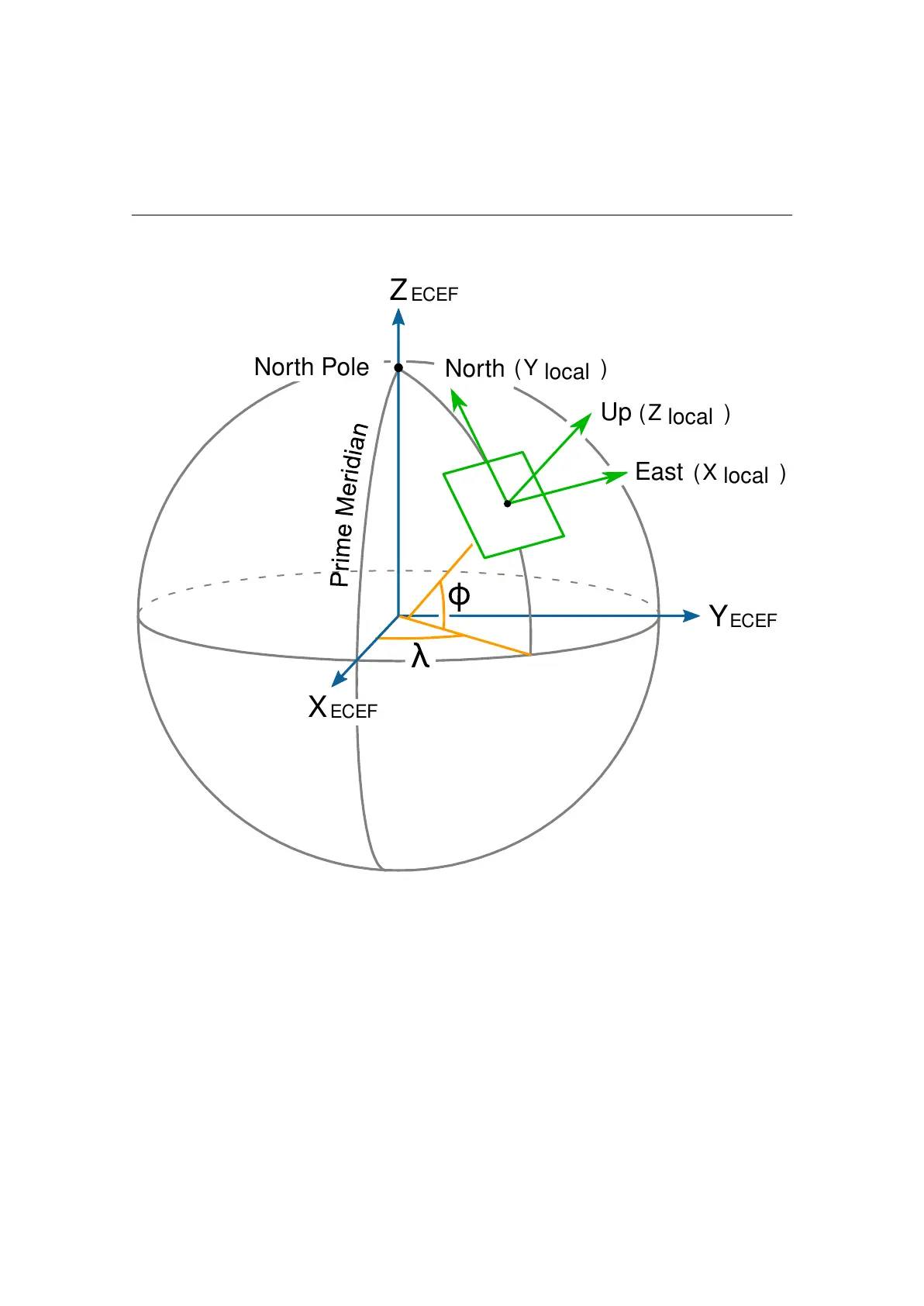
Figure C.1.: ECEF (global) and ENU (local) coordinate systems
Many different coordinate systems exist and are used to represent the pose of an object
in space. Most of them can be classified into two groups: global systems, which approxi-
mate the entire Earth (e.g., WGS-84), and local systems, which use the best approxima-
tion of the local true geometrical shape of the Earth. ECEF coordinates (Earth-Centered,
Earth-Fixed) are part of a global Cartesian system in which the center of the Earth is
placed at the origin <0,0,0>. The odometry output of the VRTK2 sensor is given in ECEF
coordinates (see Subsection 7.3.1).
Given that ECEF coordinates represent the pose of the sensor on a sphere, it is common
to draw a tangential plane to represent the local pose of the robot. This representation
is only accurate up to a certain distance from the origin (83 km on average) but makes
tracking the odometry of the robot easier. For a local frame of reference, some outputs are
given in ENU coordinates (East-North-Up). See Figure C.1 for a graphical explanation.
78