5.11. ROS driver installation
Please visit https://github.com/fixposition/fixposition_driver for more informa-
tion. From FW 2.63, both ROS1 and ROS2 are supported. The ROS driver version should
be compatible with its corresponding software release version.
The Fixposition ROS driver operating as a ROS node can listen to any I/O port to get
outputs from the Vision-RTK 2 and then publish them in the ROS network. The user can
directly stream the wheelspeed information via CAN/TCP/UART into the Vision-RTK 2.
They can also fill in the X-directional velocity information from any resources into a ROS
message and then publish it inside the ROS network so that the Fixposition ROS driver
can subscribe to this information and convert it to NOV-B_RAWDMI (binary data).
Finally, this binary information will be streamed into the Fusion engine to improve local-
ization performance. An extra node called Fixposition Odometry Converter is provided to
help integrate the wheelspeed on your vehicle. This node is intended to be used as mid-
dleware if you already have a topic with the wheelspeed values running on your system.
Currently, messages of the type Twist, TwistWithCov and Odometry are accepted.
fi
xpos
i
t
i
on
/
fi
xpos
i
t
i
on
_
d
r
i
v
e
r
P
u
b
l
ic
fi
xpos
i
t
i
on
_
d
r
i
v
e
r
/
fi
xpos
i
t
i
on
_
d
r
i
v
e
r
_
ros
1
/
.
.
F
i
xpos
i
t
i
on
D
r
i
v
e
r
ROS
1
ROS
(
b
ot
h
ROS
1
a
n
d
ROS
2)
D
r
i
v
e
r
f
or
F
i
xpos
i
t
i
on
V
i
s
i
on
-
R
T
K
2
D
e
p
e
n
de
n
cie
s
E
ige
n
3,
t
e
st
ed
w
i
t
h
v
e
rs
i
on
3.3.7
B
oost
,
t
e
st
ed
w
i
t
h
v
e
rs
i
on
1.65.0
CM
ake
[
T
r
a
ns
f
orms
]
(
h
ttp
://
w
iki
.
ros
.
or
g
/
t
f
)
C
a
t
ki
n
f
or
ROS
1
fi
xpos
i
t
i
on
_
g
nss
_
t
f
:
F
i
xpos
i
t
i
on
GNSS
T
r
a
ns
f
orm
a
t
i
on
L
ib
T
hi
s
d
r
i
v
e
r
op
e
r
a
t
e
s
a
s
a
ROS
no
de
,
c
onn
ec
t
i
n
g
to
ei
t
he
r
a
T
CP
or
s
e
r
ia
l
str
ea
m
o
f
F
i
xpos
i
t
i
on
V
i
s
i
on
-
R
T
K
output
da
t
a
,
s
ee
F
i
xpos
i
t
i
on
ASCII
m
e
ss
age
s
a
n
d
t
he
I
nt
eg
r
a
t
i
on
M
a
nu
a
l
.
I
nst
a
ll
i
n
g
de
p
e
n
de
n
cie
s
on
U
b
untu
syst
e
m
I
nst
a
ll
a
t
i
on
T
o
i
nst
a
ll
t
he
no
de
,
e
xtr
ac
t
/
c
lon
e
t
he
c
o
de
a
n
d
fixposition_gnss_tf
to
your
ca
t
ki
n
wor
k
sp
ace
'
s
src
f
ol
de
r
:
N
ot
ifica
t
i
ons
F
or
k
10
S
t
a
r
17
C
o
de
I
ssu
e
s
P
ull
r
e
qu
e
sts
A
c
t
i
ons
P
ro
jec
ts
S
ec
ur
i
ty
I
ns
igh
ts
m
ai
n
G
o
to
fi
l
e
i
xpos
i
t
i
on
-
support
S
upport
n
e
w
fi
xpos
i
t
i
on
a
s
cii
m
e
ss
age
sp
ec
s
…
2
w
eek
s
ag
o
H
i
story
i
n
c
lu
de
/
fi
xpos
i
t
i
on
_
d
r
i
v
e
r
_
ros
1
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
l
a
un
ch
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
ms
g
S
upport
n
e
w
fi
xpos
i
t
i
on
a
s
cii
m
e
ss
age
sp
ec
s
2
w
eek
s
ag
o
rv
i
z
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
sr
c
S
upport
n
e
w
fi
xpos
i
t
i
on
a
s
cii
m
e
ss
age
sp
ec
s
2
w
eek
s
ag
o
CM
ake
L
i
sts
.
txt
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
D
oxy
fi
l
e
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
README
.
m
d
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
p
ackage
.
xml
S
qu
a
s
hed
c
omm
i
t
:
l
a
st
mont
h
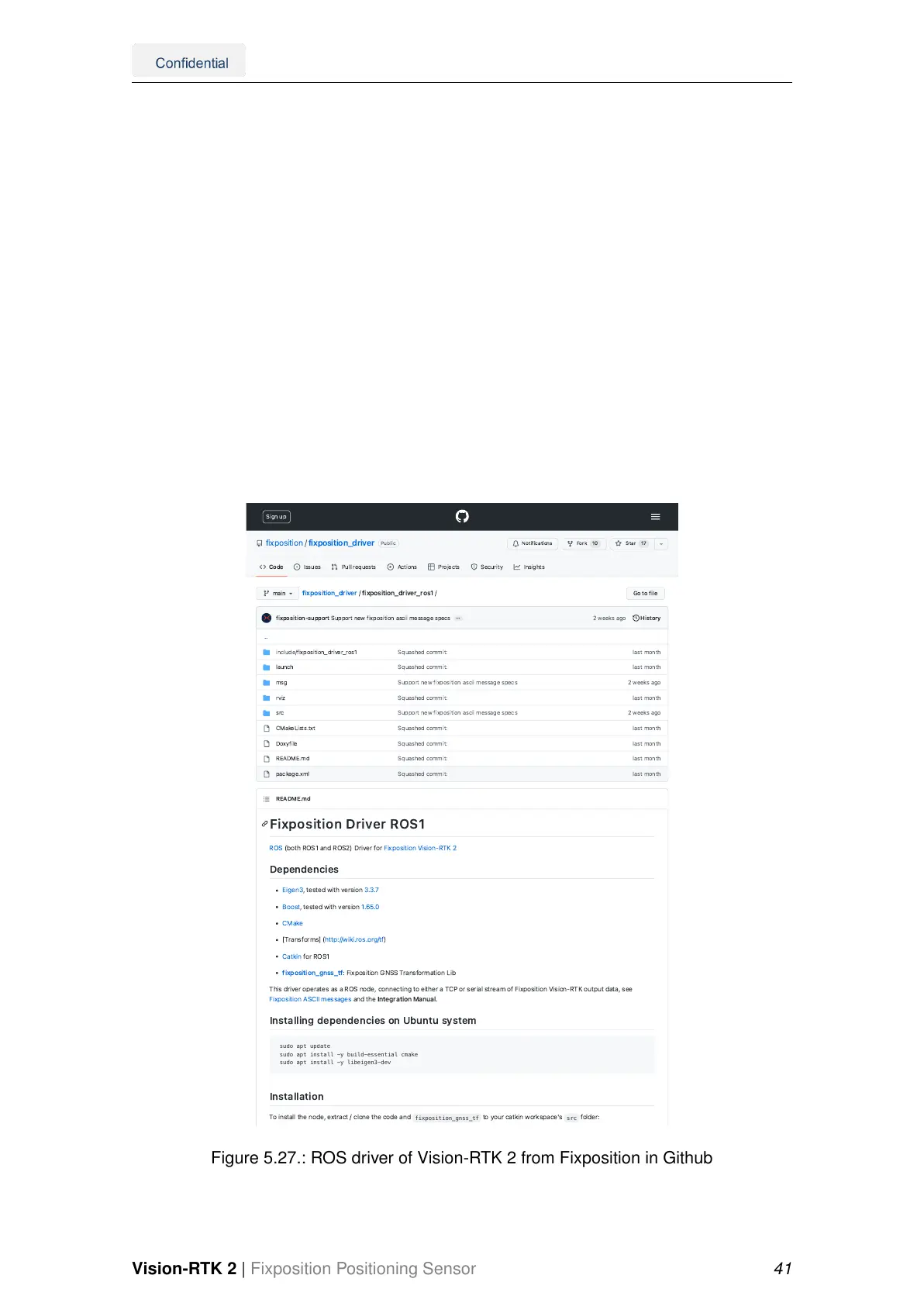
Figure 5.27.: ROS driver of Vision-RTK 2 from Fixposition in Github
Vision-RTK 2 | Fixposition Positioning Sensor 41