Fusion Status Active VIO-GNSS
Stop
Reset
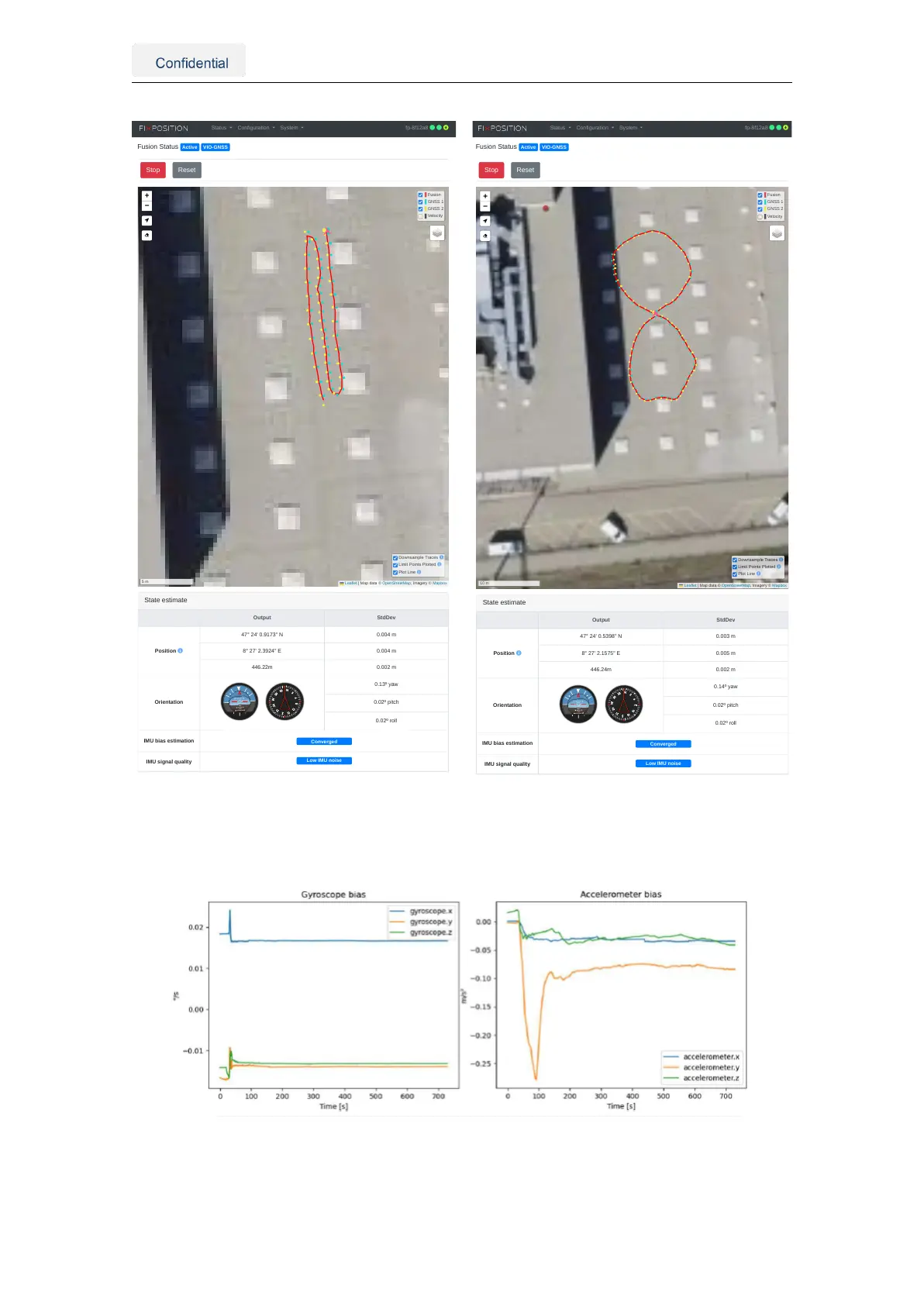
State estimate
Output StdDev
Position
47° 24' 0.9173" N 0.004 m
8° 27' 2.3924" E 0.004 m
446.22m 0.002 m
Orientation
0.13º yaw
0.02º pitch
0.02º roll
IMU bias estimation
Converged
IMU signal quality
Low IMU noise
+
−
Fusion
GNSS 1
GNSS 2
Velocity
Downsample Traces
Limit Points Plotted
Plot Line
Leaflet | Map data © OpenStreetMap, Imagery © Mapbox
Status Configuration System fp-8f12a8
(a) Drive backward and forwards
Fusion Status Active VIO-GNSS
Stop
Reset
State estimate
Output StdDev
Position
47° 24' 0.5398" N 0.003 m
8° 27' 2.1575" E 0.005 m
446.24m 0.002 m
Orientation
0.14º yaw
0.02º pitch
0.02º roll
IMU bias estimation
Converged
IMU signal quality
Low IMU noise
Fusion
GNSS 1
GNSS 2
Velocity
Downsample Traces
Limit Points Plotted
Plot Line
Leaflet | Map data © OpenStreetMap, Imagery © Mapbox
Status Configuration System fp-8f12a8
(b) Drive eight figures
Figure 5.25.: Example trajectory for the IMU calibration procedure
Figure 5.26.: Gyroscope and accelerometer biases over time
Vision-RTK 2 | Fixposition Positioning Sensor 40